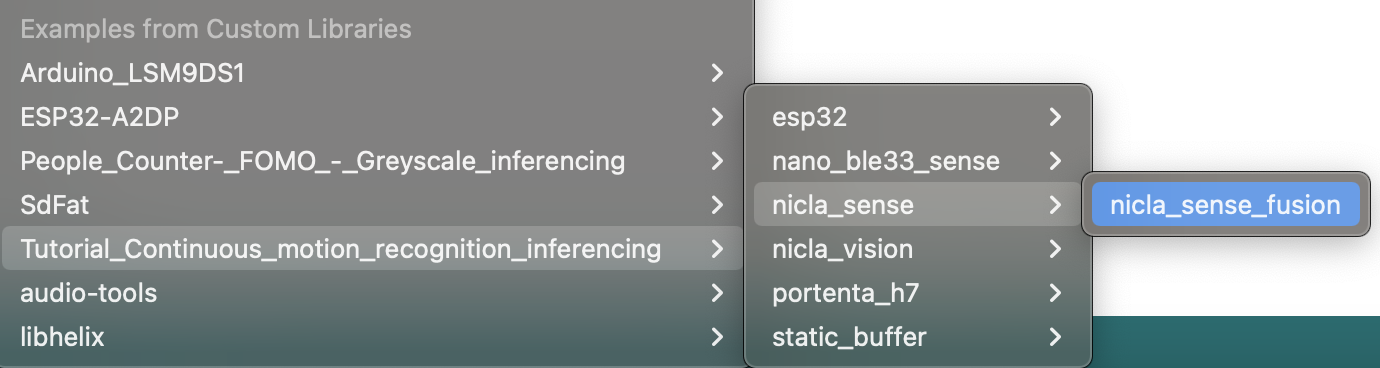
Hi @louis when I used the nicla_sense_fusion in the serial monitor appears this:
Starting inferencing in 2 seconds...
ERR: Nicla sensors don't match the sensors required in the model
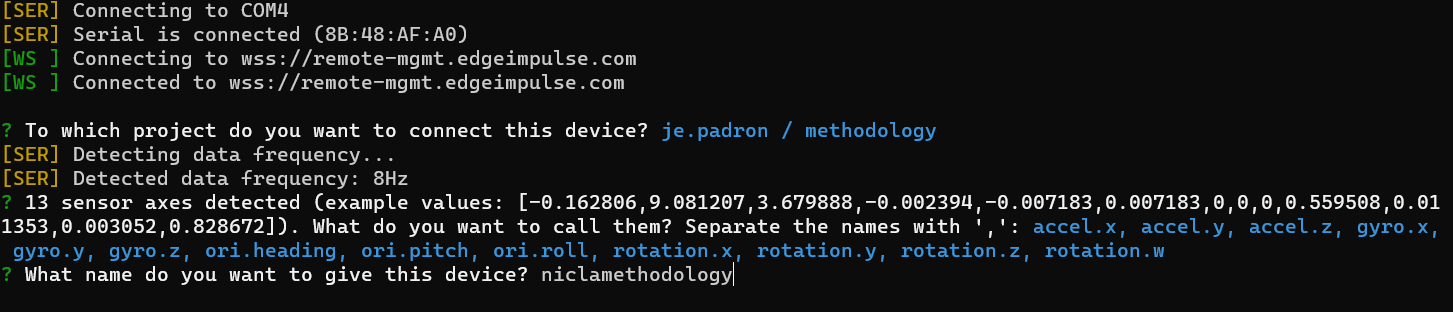
Following sensors are required: accel.x + accel.y + accel.z + gyro.x + gyro.y + gyro.z + ori.heading + ori.pitch + ori.roll + rotation.x + rotation.y + rotation.z + rotation.w
So the code in my example looks like this…
/* Includes ---------------------------------------------------------------- */
#include <sense-me-je_inferencing.h>
#include "Arduino_BHY2.h" //Click here to get the library: http://librarymanager/All#Arduino_BHY2
/** Struct to link sensor axis name to sensor value function */
typedef struct{
const char *name;
float (*get_value)(void);
}eiSensors;
/* Constant defines -------------------------------------------------------- */
#define CONVERT_G_TO_MS2 9.80665f
/** Number sensor axes used */
#define NICLA_N_SENSORS 17
/* Private variables ------------------------------------------------------- */
static const bool debug_nn = false; // Set this to true to see e.g. features generated from the raw signal
SensorXYZ accel(SENSOR_ID_ACC);
SensorXYZ gyro(SENSOR_ID_GYRO);
SensorOrientation ori(SENSOR_ID_ORI);
SensorQuaternion rotation(SENSOR_ID_RV);
Sensor temp(SENSOR_ID_TEMP);
Sensor baro(SENSOR_ID_BARO);
Sensor hum(SENSOR_ID_HUM);
Sensor gas(SENSOR_ID_GAS);
static bool ei_connect_fusion_list(const char *input_list);
static float get_accX(void){return (accel.x() * 8.0 / 32768.0) * CONVERT_G_TO_MS2;}
static float get_accY(void){return (accel.y() * 8.0 / 32768.0) * CONVERT_G_TO_MS2;}
static float get_accZ(void){return (accel.z() * 8.0 / 32768.0) * CONVERT_G_TO_MS2;}
static float get_gyrX(void){return (gyro.x() * 8.0 / 32768.0) * CONVERT_G_TO_MS2;}
static float get_gyrY(void){return (gyro.y() * 8.0 / 32768.0) * CONVERT_G_TO_MS2;}
static float get_gyrZ(void){return (gyro.z() * 8.0 / 32768.0) * CONVERT_G_TO_MS2;}
static float get_oriHeading(void){return ori.heading();}
static float get_oriPitch(void){return ori.pitch();}
static float get_oriRoll(void){return ori.roll();}
static float get_rotX(void){return rotation.x();}
static float get_rotY(void){return rotation.y();}
static float get_rotZ(void){return rotation.z();}
static float get_rotW(void){return rotation.w();}
static float get_temperature(void){return temp.value();}
static float get_barrometric_pressure(void){return baro.value();}
static float get_humidity(void){return hum.value();}
static float get_gas(void){return gas.value();}
static int8_t fusion_sensors[NICLA_N_SENSORS];
static int fusion_ix = 0;
/** Used sensors value function connected to label name */
eiSensors nicla_sensors[] =
{
"accX", &get_accX,
"accY", &get_accY,
"accZ", &get_accZ,
"gyrX", &get_gyrX,
"gyrY", &get_gyrY,
"gyrZ", &get_gyrZ,
"heading", &get_oriHeading,
"pitch", &get_oriPitch,
"roll", &get_oriRoll,
"rotX", &get_rotX,
"rotY", &get_rotY,
"rotZ", &get_rotZ,
"rotW", &get_rotW,
"temperature", &get_temperature,
"barometer", &get_barrometric_pressure,
"humidity", &get_humidity,
"gas", &get_gas,
};
/**
* @brief Arduino setup function
*/
void setup()
{
/* Init serial */
Serial.begin(115200);
// comment out the below line to cancel the wait for USB connection (needed for native USB)
while (!Serial);
Serial.println("Edge Impulse Sensor Fusion Inference\r\n");
/* Connect used sensors */
if(ei_connect_fusion_list(EI_CLASSIFIER_FUSION_AXES_STRING) == false) {
ei_printf("ERR: Errors in sensor list detected\r\n");
return;
}
/* Init & start sensors */
BHY2.begin(NICLA_I2C);
accel.begin();
gyro.begin();
ori.begin();
rotation.begin();
temp.begin();
baro.begin();
hum.begin();
gas.begin();
}
/**
* @brief Get data and run inferencing
*/
void loop()
{
ei_printf("\nStarting inferencing in 2 seconds...\r\n");
delay(2000);
if (EI_CLASSIFIER_RAW_SAMPLES_PER_FRAME != fusion_ix) {
ei_printf("ERR: Nicla sensors don't match the sensors required in the model\r\n"
"Following sensors are required: %s\r\n", EI_CLASSIFIER_FUSION_AXES_STRING);
return;
}
ei_printf("Sampling...\r\n");
// Allocate a buffer here for the values we'll read from the IMU
float buffer[EI_CLASSIFIER_DSP_INPUT_FRAME_SIZE] = { 0 };
for (size_t ix = 0; ix < EI_CLASSIFIER_DSP_INPUT_FRAME_SIZE; ix += EI_CLASSIFIER_RAW_SAMPLES_PER_FRAME) {
// Determine the next tick (and then sleep later)
int64_t next_tick = (int64_t)micros() + ((int64_t)EI_CLASSIFIER_INTERVAL_MS * 1000);
// Update function should be continuously polled
BHY2.update();
for(int i = 0; i < fusion_ix; i++) {
buffer[ix + i] = nicla_sensors[fusion_sensors[i]].get_value();
}
int64_t wait_time = next_tick - (int64_t)micros();
if(wait_time > 0) {
delayMicroseconds(wait_time);
}
}
// Turn the raw buffer in a signal which we can the classify
signal_t signal;
int err = numpy::signal_from_buffer(buffer, EI_CLASSIFIER_DSP_INPUT_FRAME_SIZE, &signal);
if (err != 0) {
ei_printf("ERR:(%d)\r\n", err);
return;
}
// Run the classifier
ei_impulse_result_t result = { 0 };
err = run_classifier(&signal, &result, debug_nn);
if (err != EI_IMPULSE_OK) {
ei_printf("ERR:(%d)\r\n", err);
return;
}
// print the predictions
ei_printf("Predictions (DSP: %d ms., Classification: %d ms., Anomaly: %d ms.):\r\n",
result.timing.dsp, result.timing.classification, result.timing.anomaly);
for (size_t ix = 0; ix < EI_CLASSIFIER_LABEL_COUNT; ix++) {
ei_printf("%s: %.5f\r\n", result.classification[ix].label, result.classification[ix].value);
}
#if EI_CLASSIFIER_HAS_ANOMALY == 1
ei_printf(" anomaly score: %.3f\r\n", result.anomaly);
#endif
}
#if !defined(EI_CLASSIFIER_SENSOR) || (EI_CLASSIFIER_SENSOR != EI_CLASSIFIER_SENSOR_FUSION && EI_CLASSIFIER_SENSOR != EI_CLASSIFIER_SENSOR_ACCELEROMETER)
#error "Invalid model for current sensor"
#endif
/**
* @brief Go through nicla sensor list to find matching axis name
*
* @param axis_name
* @return int8_t index in nicla sensor list, -1 if axis name is not found
*/
static int8_t ei_find_axis(char *axis_name)
{
int ix;
for(ix = 0; ix < NICLA_N_SENSORS; ix++) {
if(strstr(axis_name, nicla_sensors[ix].name)) {
return ix;
}
}
return -1;
}
/**
* @brief Check if requested input list is valid sensor fusion, create sensor buffer
*
* @param[in] input_list Axes list to sample (ie. "accX + gyrY + magZ")
* @retval false if invalid sensor_list
*/
static bool ei_connect_fusion_list(const char *input_list)
{
char *buff;
bool is_fusion = false;
/* Copy const string in heap mem */
char *input_string = (char *)ei_malloc(strlen(input_list) + 1);
if (input_string == NULL) {
return false;
}
memset(input_string, 0, strlen(input_list) + 1);
strncpy(input_string, input_list, strlen(input_list));
/* Clear fusion sensor list */
memset(fusion_sensors, 0, NICLA_N_SENSORS);
fusion_ix = 0;
buff = strtok(input_string, "+");
while (buff != NULL) { /* Run through buffer */
int8_t found_axis = 0;
is_fusion = false;
found_axis = ei_find_axis(buff);
if(found_axis >= 0) {
if(fusion_ix < NICLA_N_SENSORS) {
fusion_sensors[fusion_ix++] = found_axis;
}
is_fusion = true;
}
buff = strtok(NULL, "+ ");
}
ei_free(input_string);
return is_fusion;
}
Best Eduardo