Question/Issue: Cannot detect the correct gesture using the USB camera on Raspberry Pi 4
Project ID: 400673
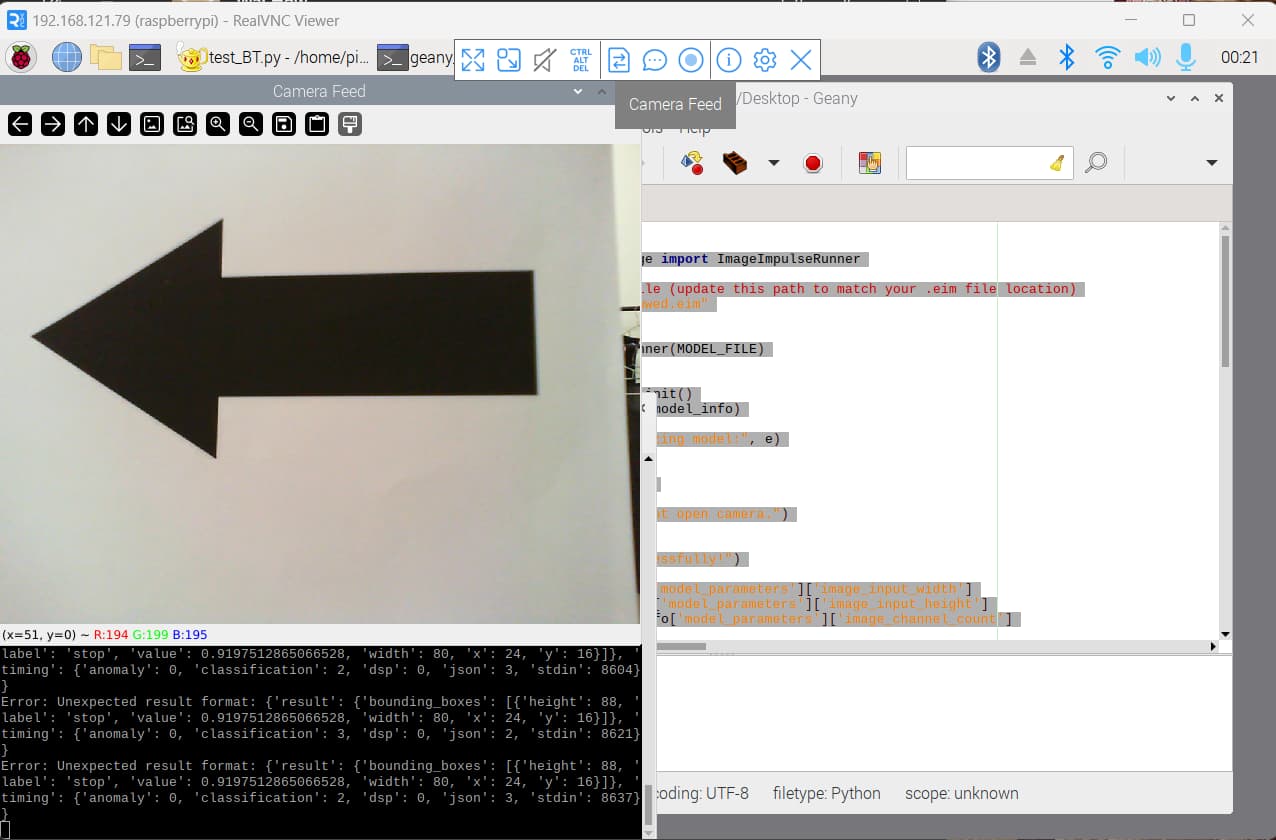
**Context/Use case: I am a newbie to coding, so most of the code I am using right now are from ChatGPT. Currently, I am working on an object detection project with FOMO and Raspberry Pi. I have the model and have successfully connected my Raspi with Edge Impulse using “edge-impulse-linux”. I use a Linux (AARCH64) deployment file. I tried with the Quantized (int8) model and Unoptimized (float32) model. But both models do not work for me. I tried to change this " resized_frame = resized_frame.astype(np.float32)" from float32 to int8, not sure if this will affect the eim file? There is an error “Unexpected result format” and keeps showing only the label: “stop”, which I show a “Front” gesture to the camera.
Here is the code:
import cv2
import numpy as np
from edge_impulse_linux.image import ImageImpulseRunner
path to your .eim model file (update this path to match your .eim file location)
MODEL_FILE = “/home/pi/arrowwed.eim”
def main():
runner = ImageImpulseRunner(MODEL_FILE)
try:
model_info = runner.init()
print("Model info:", model_info)
except Exception as e:
print("Error initializing model:", e)
return
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Error: Could not open camera.")
return
print("Camera opened successfully!")
input_width = model_info['model_parameters']['image_input_width']
input_height = model_info['model_parameters']['image_input_height']
input_channels = model_info['model_parameters']['image_channel_count']
try:
while True:
ret, frame = cap.read()
if not ret:
print("Error: Could not read frame.")
break
# Display the camera feed
cv2.imshow("Camera Feed", frame)
# Resize the image to match the model input dimensions
resized_frame = cv2.resize(frame, (input_width, input_height))
# Convert image to the format required by the model (if needed)
if input_channels == 1:
resized_frame = cv2.cvtColor(resized_frame, cv2.COLOR_BGR2GRAY)
resized_frame = resized_frame.reshape(input_height, input_width, input_channels)
else:
resized_frame = resized_frame.reshape(input_height, input_width, input_channels)
# Normalize the image
resized_frame = resized_frame.astype(np.float32) / 255.0
# Flatten the image
features = resized_frame.flatten()
# Run inference
try:
res = runner.classify(features.tolist())
if "classification" in res["result"]:
predicted_direction = max(res['result']['classification'], key=res['result']['classification'].get)
print("Detected gesture:", predicted_direction)
else:
print("Error: Unexpected result format:", res)
except Exception as e:
print("Error during classification:", e)
break
# Press 'q' to exit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
finally:
cap.release()
cv2.destroyAllWindows()
runner.stop()
if name == “main”:
main()
The picture when I run the code:
I am placing the camera on my left side from top, so the arrow picture look like another direction.
**