Arduino has announced the PortentaH7 Lite a slightly cheaper version of the PortentaH7.
with a blog and video at
This brings up a good point. Is anyone at Edge Impulse interested in working on the Vision Shield software that works on the Portenta to load an Edge Impulse model?
Last I responded with @janjongboom Edge was waiting for the Memory upgrades here to allow memory flexibility between the Portenta 2 cores, but those upgrades are not really going to change things dramatically they are just going to allow bigger models to be loaded.
Last I worked with it, it was very difficult to monitor anything since you had know idea what the camera was seeing. I am going to see if I can get an OLED working with the camera to simplify this issue. I also have old code that used to work which I would like to have someone look at and make some suggestions for improving, tidying it up. Perhaps @dansitu or @aurel ?
I start my after school Machine Learning October 7th and would like to use the Portenta, but I am worried that I can’t get vision working for them.
Here is my code that used to work.
/*
*
* Must use portenta camerera explained in this PR
* https://github.com/arduino/ArduinoCore-mbed/pull/122
* Should be implemented with MBED version greater than 1.3.1
* Until then needs the 2 main library folders Portenta_Camera and Himax_HM01B0
*
*
*/
#define EI_DSP_IMAGE_BUFFER_STATIC_SIZE 128
/* Includes ---------------------------------------------------------------- */
#include <ov7670-08-detect-micro-restored_inference.h>
#include "camera.h"
CameraClass myCam;
// raw frame buffer from the camera
#define FRAME_BUFFER_COLS 320 // 160
#define FRAME_BUFFER_ROWS 240 // 120
//uint16_t frame_buffer[FRAME_BUFFER_COLS * FRAME_BUFFER_ROWS] = { 0 };
uint8_t frame_buffer[320*240] __attribute__((aligned(32)));
// cutout that we want (this does not do a resize, which would also be an option, but you'll need some resize lib for that)
#define CUTOUT_COLS EI_CLASSIFIER_INPUT_WIDTH
#define CUTOUT_ROWS EI_CLASSIFIER_INPUT_HEIGHT
const int cutout_row_start = (FRAME_BUFFER_ROWS - CUTOUT_ROWS) / 2;
const int cutout_col_start = (FRAME_BUFFER_COLS - CUTOUT_COLS) / 2;
/**
* This function is called by the classifier to get data
* We don't want to have a separate copy of the cutout here, so we'll read from the frame buffer dynamically
*/
int cutout_get_data(size_t offset, size_t length, float *out_ptr) {
// so offset and length naturally operate on the *cutout*, so we need to cut it out from the real framebuffer
size_t bytes_left = length;
size_t out_ptr_ix = 0;
// read byte for byte
while (bytes_left != 0) {
// find location of the byte in the cutout
size_t cutout_row = floor(offset / CUTOUT_COLS);
size_t cutout_col = offset - (cutout_row * CUTOUT_COLS);
// then read the value from the real frame buffer
size_t frame_buffer_row = cutout_row + cutout_row_start;
size_t frame_buffer_col = cutout_col + cutout_col_start;
// grab the value and convert to r/g/b
uint8_t pixel = frame_buffer[(frame_buffer_row * FRAME_BUFFER_COLS) + frame_buffer_col];
//uint8_t pixel = (pixelTemp>>8) | (pixelTemp<<8);
//uint8_t pixel = 255-pixelTemp;
uint8_t r = pixel;
uint8_t g = pixel;
uint8_t b = pixel;
// then convert to out_ptr format
float pixel_f = (r << 16) + (g << 8) + b;
out_ptr[out_ptr_ix] = pixel_f;
// and go to the next pixel
out_ptr_ix++;
offset++;
bytes_left--;
}
// and done!
return 0;
}
/**
* @brief Arduino setup function
*/
void setup()
{
// put your setup code here, to run once:
Serial.begin(115200);
// Serial.begin(921600);
// Init the cam
myCam.begin(CAMERA_R320x240, 30);
// Skip 60 frames
// myCam.skip_frames(frame_buffer, 30);
Serial.println("Edge Impulse Inferencing Demo");
}
/**
* @brief Arduino main function
*/
void loop()
{
ei_printf("Edge Impulse standalone inferencing (Arduino)\n");
ei_impulse_result_t result = { 0 };
// if (Serial) {
// Grab frame and write to serial
// if (cam.grab(frame_buffer) == 0) {
// Serial.write(frame_buffer, 320*240);
// }
//}
// potentially need to check for above framebuffer == 0
int myCamResult = myCam.grab(frame_buffer); // myCamResult should be zero
// int myCamResult;
// do {
// myCamResult = myCam.grab(frame_buffer);
// } while (myCamResult != 0);
// myCam.skip_frames(frame_buffer, 60);
// the features are stored into flash, and we don't want to load everything into RAM
signal_t features_signal;
features_signal.total_length = CUTOUT_COLS * CUTOUT_ROWS;
features_signal.get_data = &cutout_get_data;
// invoke the impulse
EI_IMPULSE_ERROR res = run_classifier(&features_signal, &result, false /* debug */);
ei_printf("run_classifier returned: %d\n", res);
if (res != 0) return;
// print the predictions
ei_printf("Predictions ");
ei_printf("(DSP: %d ms., Classification: %d ms., Anomaly: %d ms.)",
result.timing.dsp, result.timing.classification, result.timing.anomaly);
ei_printf(": \n");
ei_printf("[");
for (size_t ix = 0; ix < EI_CLASSIFIER_LABEL_COUNT; ix++) {
ei_printf("%.5f", result.classification[ix].value);
#if EI_CLASSIFIER_HAS_ANOMALY == 1
ei_printf(", ");
#else
if (ix != EI_CLASSIFIER_LABEL_COUNT - 1) {
ei_printf(", ");
}
#endif
}
#if EI_CLASSIFIER_HAS_ANOMALY == 1
ei_printf("%.3f", result.anomaly);
#endif
ei_printf("]\n");
// human-readable predictions
for (size_t ix = 0; ix < EI_CLASSIFIER_LABEL_COUNT; ix++) {
ei_printf(" %s: %.5f\n", result.classification[ix].label, result.classification[ix].value);
}
#if EI_CLASSIFIER_HAS_ANOMALY == 1
ei_printf(" anomaly score: %.3f\n", result.anomaly);
#endif
/* unbracket to grab an image of what the board sees */
for (size_t ix = 0; ix < features_signal.total_length; ix++) {
float value[1];
features_signal.get_data(ix, 1, value);
ei_printf("0x%06x", (int)value[0]);
if (ix != features_signal.total_length - 1) {
ei_printf(", ");
}
}
Serial.println();
delay(7000);
}
/**
* @brief Printf function uses vsnprintf and output using Arduino Serial
*
* @param[in] format Variable argument list
*/
void ei_printf(const char *format, ...) {
static char print_buf[1024] = { 0 };
va_list args;
va_start(args, format);
int r = vsnprintf(print_buf, sizeof(print_buf), format, args);
va_end(args);
if (r > 0) {
Serial.write(print_buf);
}
}
I will probably post working code Portenta Vision Code here on my new Maker100 curriculum. (Lots of other Portenta maker examples there)
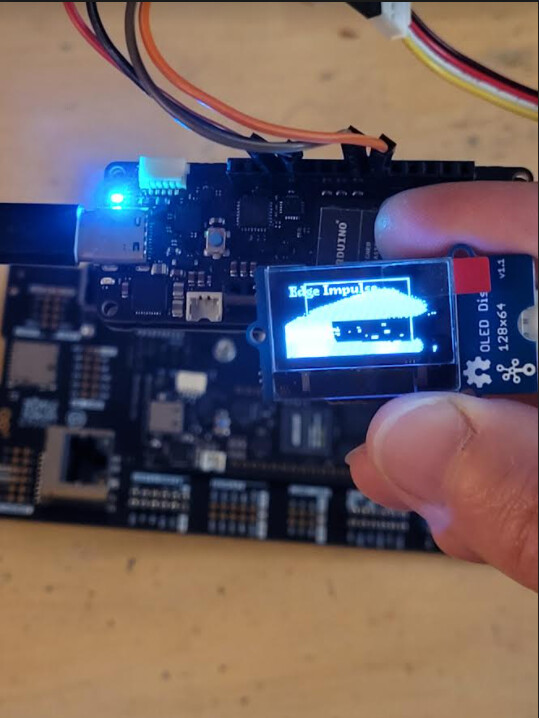
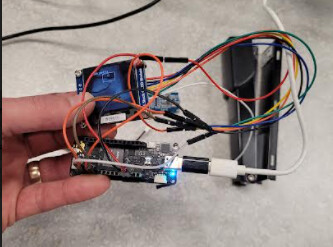

 320x320 Portenta Camera classifying 96x96 edge impulse model showing on a 128x128 Grayscale OLED, using M7:M4 50:50
320x320 Portenta Camera classifying 96x96 edge impulse model showing on a 128x128 Grayscale OLED, using M7:M4 50:50