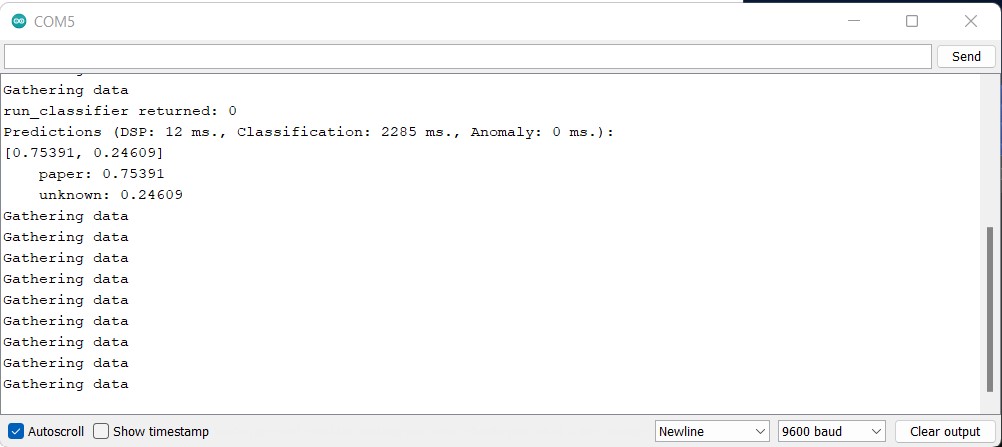
Hello, can anyone help me on this. I am still trying to connect the ov2640 arducam to the Pico to get live data. I can’t seem to connect the port, like the port won’t show on the arduino serial monitor. It works just fine without the arducam library but when i added the library it does this. Here is the screenshot:
I’ve based the arducam library and how to set it up with the Pico in this github link: RPI-Pico-Cam/tflmicro at master · ArduCAM/RPI-Pico-Cam · GitHub
Here is my main.cpp in source/main.cpp:
#include "ei_run_classifier.h"
// #include "hardware/gpio.h"
// #include "hardware/uart.h"
// #include "pico/stdio_usb.h"
#include "pico/stdlib.h"
#ifdef __cplusplus
extern "C"
{
#include "arducam.h"
}
#endif
#include <stdio.h>
const uint LED_PIN = 25;
static const float features[] = {
// copy raw features here (for example from the 'Live classification' page)
};
#ifndef DO_NOT_OUTPUT_TO_UART
// RX interrupt handler
void on_uart_rx() {
uint8_t cameraCommand = 0;
while (uart_is_readable(UART_ID)) {
cameraCommand = uart_getc(UART_ID);
// Can we send it back?
if (uart_is_writable(UART_ID)) {
uart_putc(UART_ID, cameraCommand);
}
}
}
void setup_uart() {
// Set up our UART with the required speed.
uint baud = uart_init(UART_ID, BAUD_RATE);
// Set the TX and RX pins by using the function select on the GPIO
// Set datasheet for more information on function select
gpio_set_function(UART_TX_PIN, GPIO_FUNC_UART);
gpio_set_function(UART_RX_PIN, GPIO_FUNC_UART);
// Set our data format
uart_set_format(UART_ID, DATA_BITS, STOP_BITS, PARITY);
// Turn off FIFO's - we want to do this character by character
uart_set_fifo_enabled(UART_ID, false);
// Set up a RX interrupt
// We need to set up the handler first
// Select correct interrupt for the UART we are using
int UART_IRQ = UART_ID == uart0 ? UART0_IRQ : UART1_IRQ;
// And set up and enable the interrupt handlers
irq_set_exclusive_handler(UART_IRQ, on_uart_rx);
irq_set_enabled(UART_IRQ, true);
// Now enable the UART to send interrupts - RX only
uart_set_irq_enables(UART_ID, true, false);
}
#else
void setup_uart() {}
#endif
int raw_feature_get_data(size_t offset, size_t length, float *out_ptr)
{
ei_printf("Gathering data \n");
printf("All Good \n");
memcpy(out_ptr, features + offset, length * sizeof(float));
return 0;
}
int main()
{
// stdio_usb_init();
setup_uart();
// stdio_init_all();
gpio_init(LED_PIN);
gpio_set_dir(LED_PIN, GPIO_OUT);
// arducam.systemInit();
printf("pass");
// if (arducam.busDetect())
// {
// return 1;
// }
// if (arducam.cameraProbe())
// {
// return 1;
// }
// arducam.cameraInit(YUV);
ei_impulse_result_t result = {nullptr};
while (true)
{
ei_printf("Edge Impulse standalone inferencing (Raspberry Pi Pico)\n");
if (sizeof(features) / sizeof(float) != EI_CLASSIFIER_DSP_INPUT_FRAME_SIZE)
{
ei_printf("The size of your 'features' array is not correct. Expected %d items, but had %u\n",
EI_CLASSIFIER_DSP_INPUT_FRAME_SIZE, sizeof(features) / sizeof(float));
return 1;
}
while (1)
{
// blink LED
gpio_put(LED_PIN, !gpio_get(LED_PIN));
// the features are stored into flash, and we don't want to load everything into RAM
signal_t features_signal;
features_signal.total_length = sizeof(features) / sizeof(features[0]);
features_signal.get_data = &raw_feature_get_data;
// invoke the impulse
EI_IMPULSE_ERROR res = run_classifier(&features_signal, &result, false);
ei_printf("run_classifier returned: %d\n", res);
if (res != 0)
return 1;
ei_printf("Predictions (DSP: %d ms., Classification: %d ms., Anomaly: %d ms.): \n",
result.timing.dsp, result.timing.classification, result.timing.anomaly);
// print the predictions
ei_printf("[");
for (size_t ix = 0; ix < EI_CLASSIFIER_LABEL_COUNT; ix++)
{
ei_printf("%.5f", result.classification[ix].value);
#if EI_CLASSIFIER_HAS_ANOMALY == 1
ei_printf(", ");
#else
if (ix != EI_CLASSIFIER_LABEL_COUNT - 1)
{
ei_printf(", ");
}
#endif
}
#if EI_CLASSIFIER_HAS_ANOMALY == 1
printf("%.3f", result.anomaly);
#endif
printf("]\n");
// human-readable predictions
for (size_t ix = 0; ix < EI_CLASSIFIER_LABEL_COUNT; ix++) {
ei_printf(" %s: %.5f\n", result.classification[ix].label, result.classification[ix].value);
}
ei_sleep(2000);
}
}
}
Here is my CMakeLists.txt in root:
cmake_minimum_required(VERSION 3.13.1)
set(MODEL_FOLDER .)
set(EI_SDK_FOLDER edge-impulse-sdk)
include(pico_sdk_import.cmake)
project(pico_paper_detection C CXX ASM)
set(CMAKE_C_STANDARD 11)
set(CMAKE_CXX_STANDARD 11)
pico_sdk_init()
add_subdirectory("Arducam")
add_executable(pico_paper_detection
source/main.cpp
)
include(${MODEL_FOLDER}/edge-impulse-sdk/cmake/utils.cmake)
target_link_libraries(pico_paper_detection
PUBLIC Arducam
pico_stdlib
)
target_include_directories(pico_paper_detection PUBLIC
"${PROJECT_BINARY_DIR}"
"${PROJECT_SOURCE_DIR}/Arducam"
)
# enable usb output, disable uart output
pico_enable_stdio_usb(pico_paper_detection 1)
pico_enable_stdio_uart(pico_paper_detection 0)
target_include_directories(pico_paper_detection PRIVATE
${MODEL_FOLDER}
${MODEL_FOLDER}/classifer
${MODEL_FOLDER}/tflite-model
${MODEL_FOLDER}/model-parameters
)
target_include_directories(pico_paper_detection PRIVATE
${EI_SDK_FOLDER}
${EI_SDK_FOLDER}/third_party/ruy
${EI_SDK_FOLDER}/third_party/gemmlowp
${EI_SDK_FOLDER}/third_party/flatbuffers/include
${EI_SDK_FOLDER}/third_party
${EI_SDK_FOLDER}/tensorflow
${EI_SDK_FOLDER}/dsp
${EI_SDK_FOLDER}/classifier
${EI_SDK_FOLDER}/anomaly
${EI_SDK_FOLDER}/CMSIS/NN/Include
${EI_SDK_FOLDER}/CMSIS/DSP/PrivateInclude
${EI_SDK_FOLDER}/CMSIS/DSP/Include
${EI_SDK_FOLDER}/CMSIS/Core/Include
)
include_directories(${INCLUDES})
# find model source files
RECURSIVE_FIND_FILE(MODEL_FILES "${MODEL_FOLDER}/tflite-model" "*.cpp")
RECURSIVE_FIND_FILE(SOURCE_FILES "${EI_SDK_FOLDER}" "*.cpp")
RECURSIVE_FIND_FILE(CC_FILES "${EI_SDK_FOLDER}" "*.cc")
RECURSIVE_FIND_FILE(S_FILES "${EI_SDK_FOLDER}" "*.s")
RECURSIVE_FIND_FILE(C_FILES "${EI_SDK_FOLDER}" "*.c")
list(APPEND SOURCE_FILES ${S_FILES})
list(APPEND SOURCE_FILES ${C_FILES})
list(APPEND SOURCE_FILES ${CC_FILES})
list(APPEND SOURCE_FILES ${MODEL_FILES})
# add all sources to the project
target_sources(pico_paper_detection PRIVATE ${SOURCE_FILES})
pico_add_extra_outputs(pico_paper_detection)
Here is the CMakeLists.txt in the Arducam directory that I modified:
# aux_source_directory(. DIR_LIB_SRCS)
# add_library(arducam ${DIR_LIB_SRCS})
# target_include_directories(arducam
# PUBLIC
# ${CMAKE_CURRENT_LIST_DIR}/.
# )
# target_link_libraries(arducam pico_stdlib hardware_i2c hardware_spi)
# enable usb output, disable uart output
# my modifications
add_library(Arducam arducam.c arducam.h ov2640.h)
target_link_libraries(Arducam pico_stdlib hardware_i2c hardware_spi)
target_include_directories(Arducam PUBLIC "${CMAKE_CURRENT_SOURCE_DIR}")```