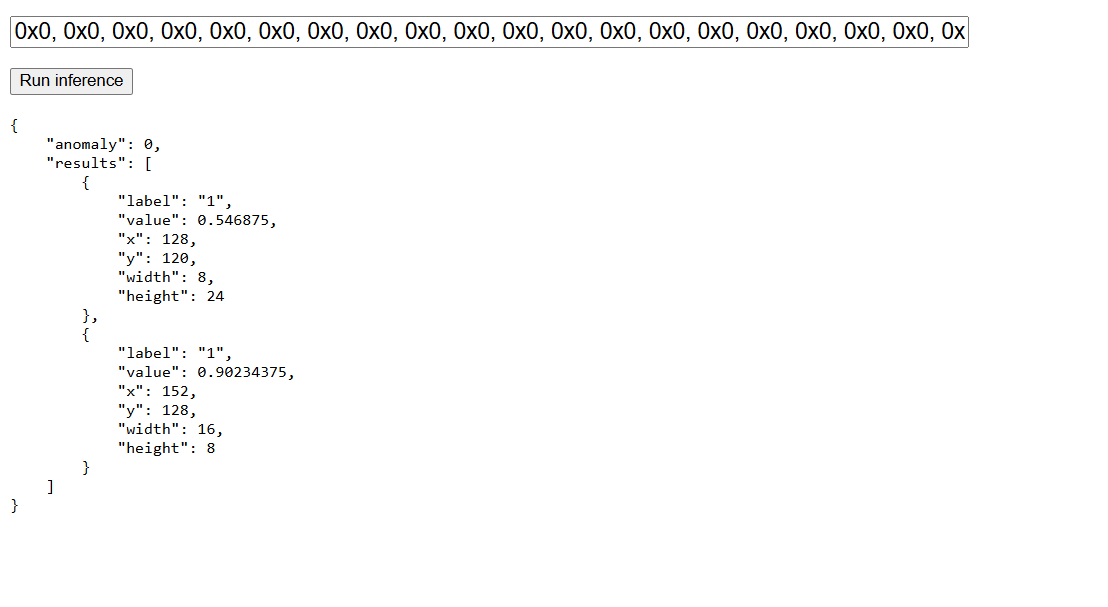
I am using the FOMO 0.35 to detect human presence, I don’t really need the bounding box exactly, I am happy to get the centroid as mentioned the the docs. But when I use tflite Interpreter() to load and run to invoke() inference result[0][0][0] is a list of size 6
It says they are x, y, w, h, label, conf but I couldn’t identify the position of these values in the list
I would love to know the index position of these fields in the record list returned
like I wanna find if the conf is in list[0] or list[5]
I have logic to implement with the detection result
Hopefully waiting for reply
interpreter.invoke()
output_data = interpreter.get_tensor(output_details[0]['index'])
print("Output:", output_data)
Input shape: [ 1 480 320 3]
Output: [[[[[154 145 147 158 28 232]
[149 150 150 157 37 230]
[148 154 151 158 19 229]
…
[149 151 147 147 35 220]
[148 148 145 146 41 221]
[150 146 143 149 46 228]]
[[159 136 146 163 27 233]
[151 137 151 161 39 230]
[149 146 155 164 18 230]
…
[147 152 148 155 38 220]
[146 149 145 154 37 220]
[149 146 141 157 51 230]]
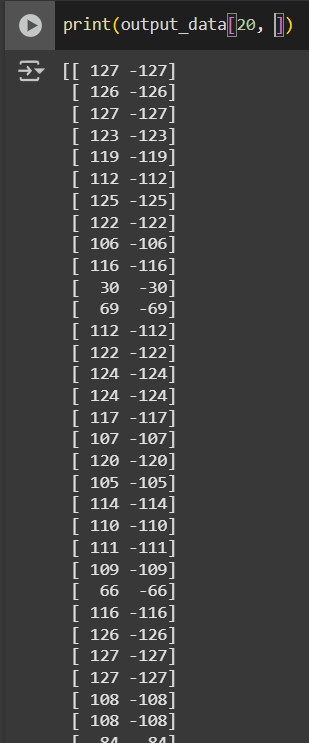
These are the list returned by the model
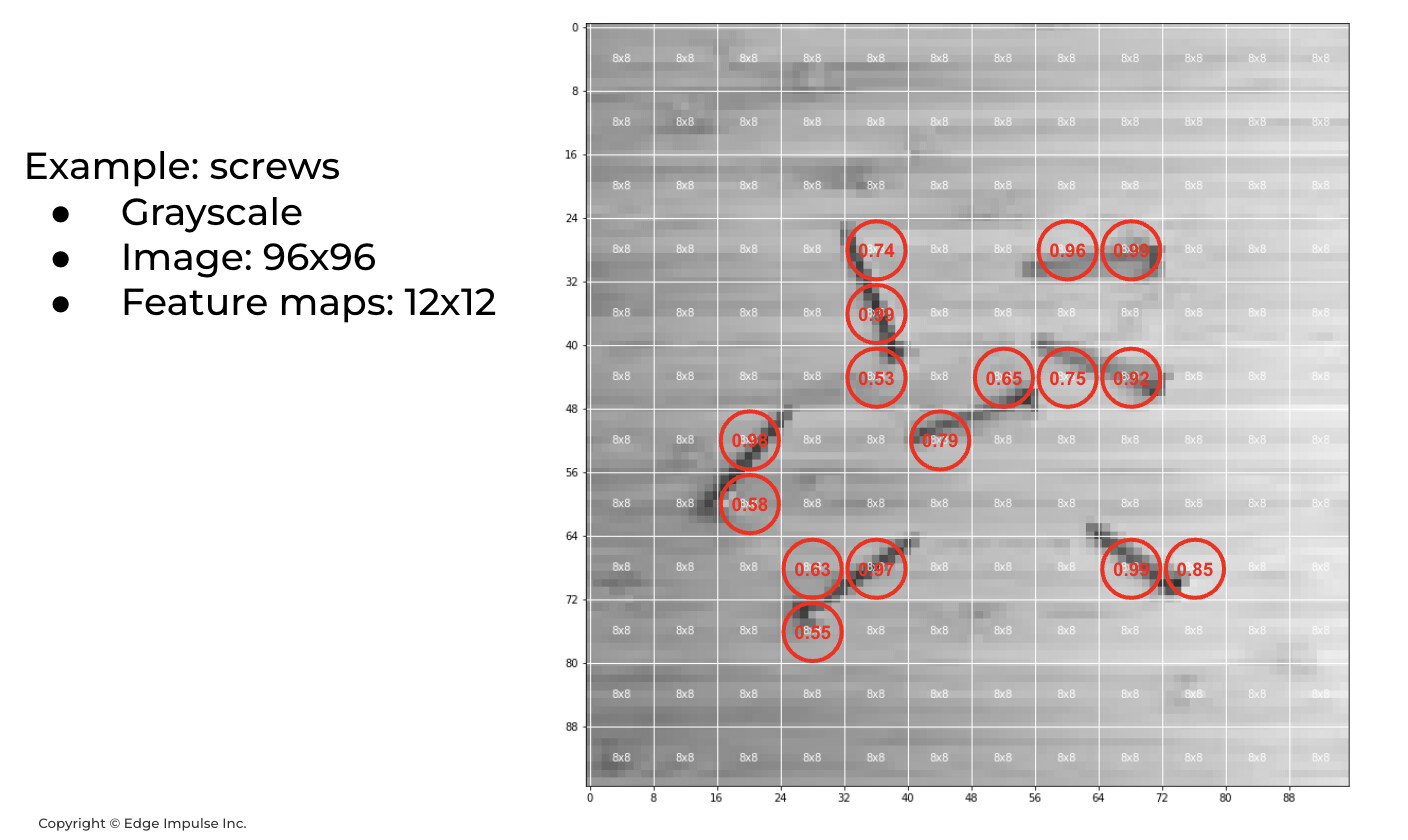
my model takes 320x320x1 images to return a 40x40 grid with the confidence of object
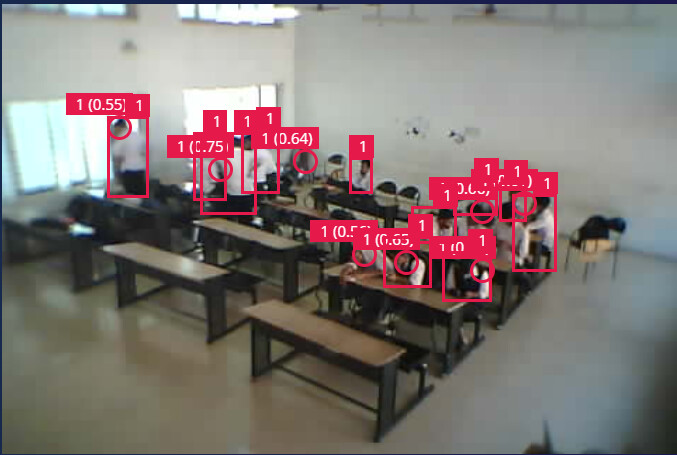
I found that label is an element of this list, but I have only 1 label for human class which is “1”
I didn’t see any “1” here but saw many other values which makes no sense to me
Please provide the signature of the data structure returned such as index representation