Estoy realizando mi proyecto que consiste en la detección de semáforos peatonales, y debe detectar el semaforo en verde y rojo, he realizado varios entrenamientos, pero no he tenido buena precisión, me recomendaron aumentar datos y lo hice, actualmente tengo 680 imágenes en total, 340 por cada clase, pero tampoco he tenido buenos resultados, he realizado varios proyectos y lo máximo que he podido llegar es a 72% de precisión.
los semaforos los etiqueto de esta forma
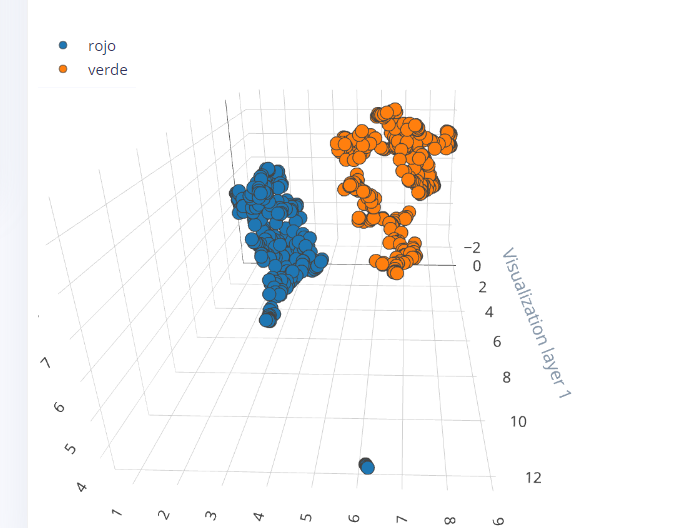
Mi mapa de características actual se separa bastante bien pero no puedo tener buenos resultados. con estas caracteristicas no he podido llegar a 70% en la precisión, por lo que al aumentar mas imagenes mi precisión a disminuido. ¿Que podría hacer para mejorar esto?
estoy trabajando en la raspberry pi 4B
ya he corrido mi modelo en mi dispositivo con la precisión de 70% y lo he probado en las calles y aun se confunde entre el rojo y verde.
Vi los datos sin procesar y, en términos de detección de objetos, está tratando de adquirir el color de la luz, lo cual es bastante confuso para los métodos de detección de objetos. Sugeriré usar métodos openCV para filtrar el fondo.
He usado el método de detección de objetos en proyectos donde hay distinción de objetos y clasificación de imágenes donde hay el mismo tipo de base de datos de imágenes [ejemplo: clasificación de gatos, perros]
@dhruvsheth@AnshumanFauzdar muchas gracias por su ayuda he logrado realizar mi proyecto ejecutando un modelo de deteccion y clasificacion al mismo tiempo
ahora espero me puedan ayudar en lo siguiente
normalmente para ejecutar los modelos en la raspberry pi 4 escribo de esta forma
“python3 /home/pi/multi_stage.py /home/pi/detector.eim /home/pi/classifier.eim”
mi pregunta es ¿en donde puedo escribrir la ruta del detector y clasificador dentro del programa principal para poder ejecutar solo escribiendo de esta forma "python3 /home/pi/multi_stage.py "?
estoy trabajando sobre este codigo
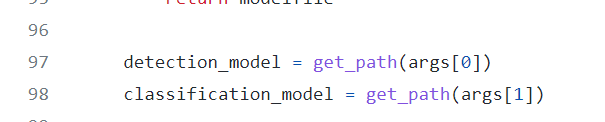
en esta parte del codigo escribi la ruta de los modelos de la siguiente forma pero me da error al momento de ejecutar
detection_model = /home/pi/detector.eim
classification_model = /home/pi/classifier.eim