hi good day again, i am trying to run my simple model locally using the linux-sdk-python,
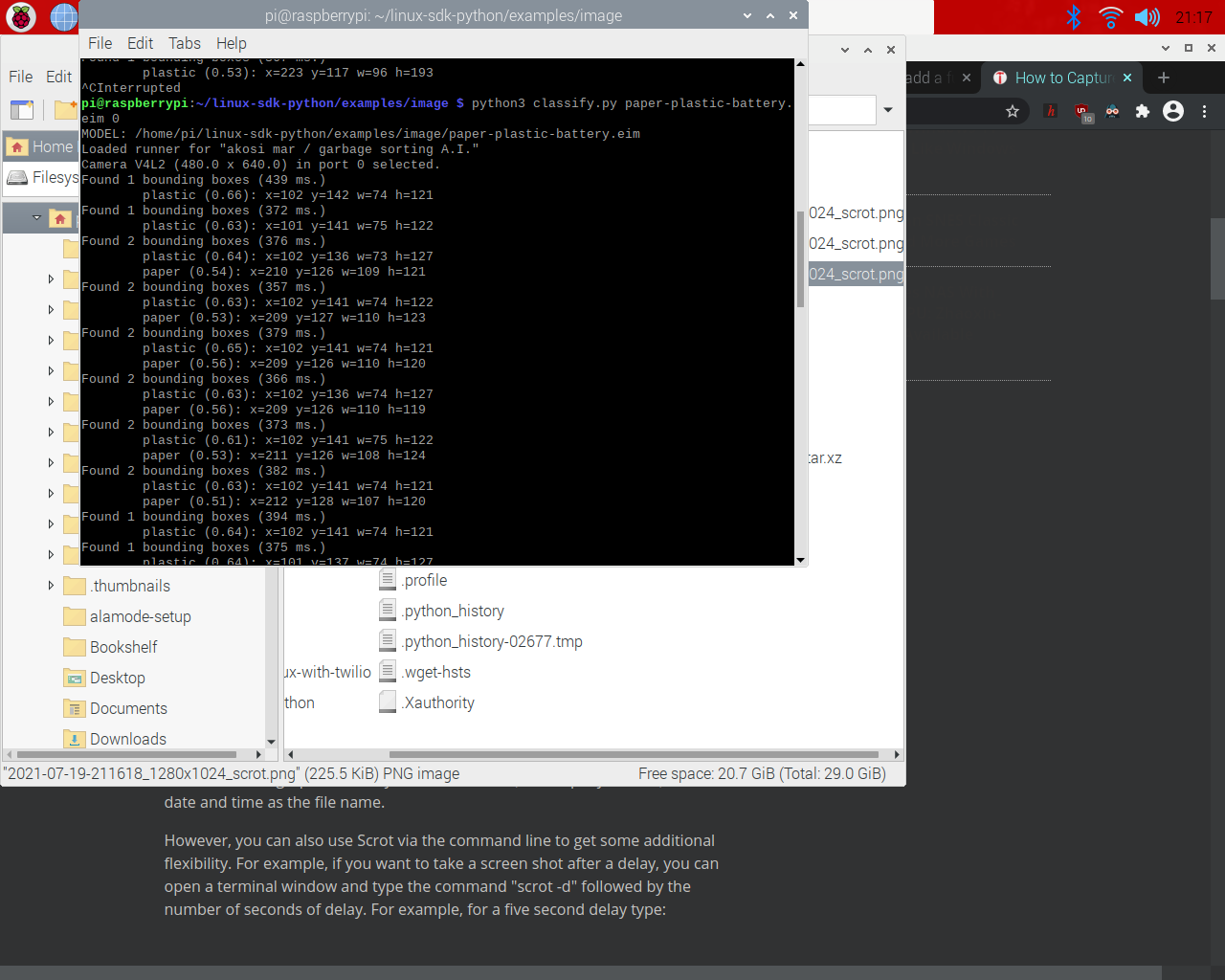
inside the image, i found the classify.py script and try to run using this command together with my model: pi@raspberrypi:~/linux-sdk-python/examples/image $ python3 classify.py paper-plastic-battery.eim
i am getting this one:
[ WARN:0] global /tmp/pip-wheel-qd18ncao/opencv-python/opencv/modules/videoio/src/cap_v4l.cpp (893) open VIDEOIO(V4L2:/dev/video1): can’t open camera by index
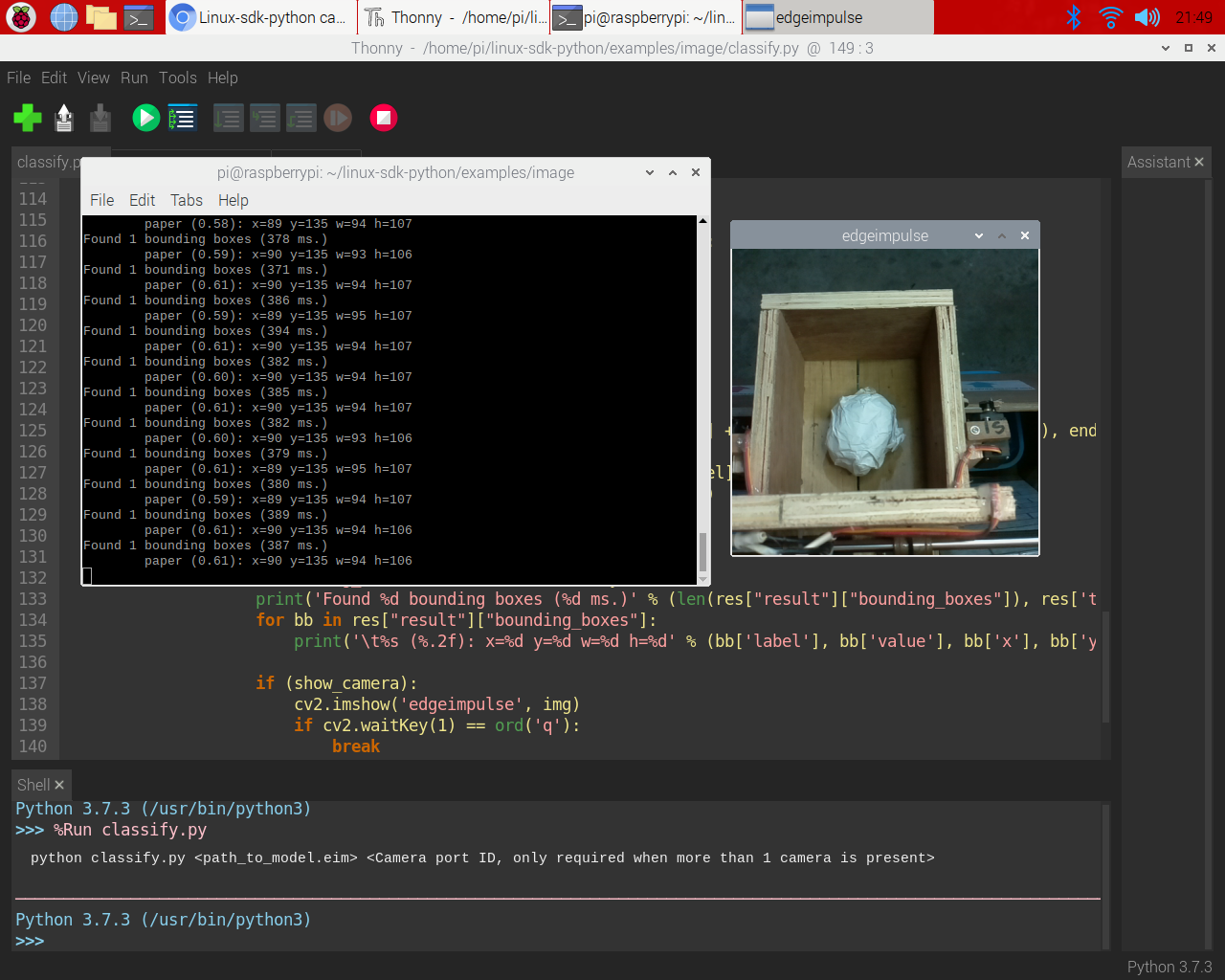
also, i am curious about this script, when this classify.py is run does this open a camera window where you can see your model?
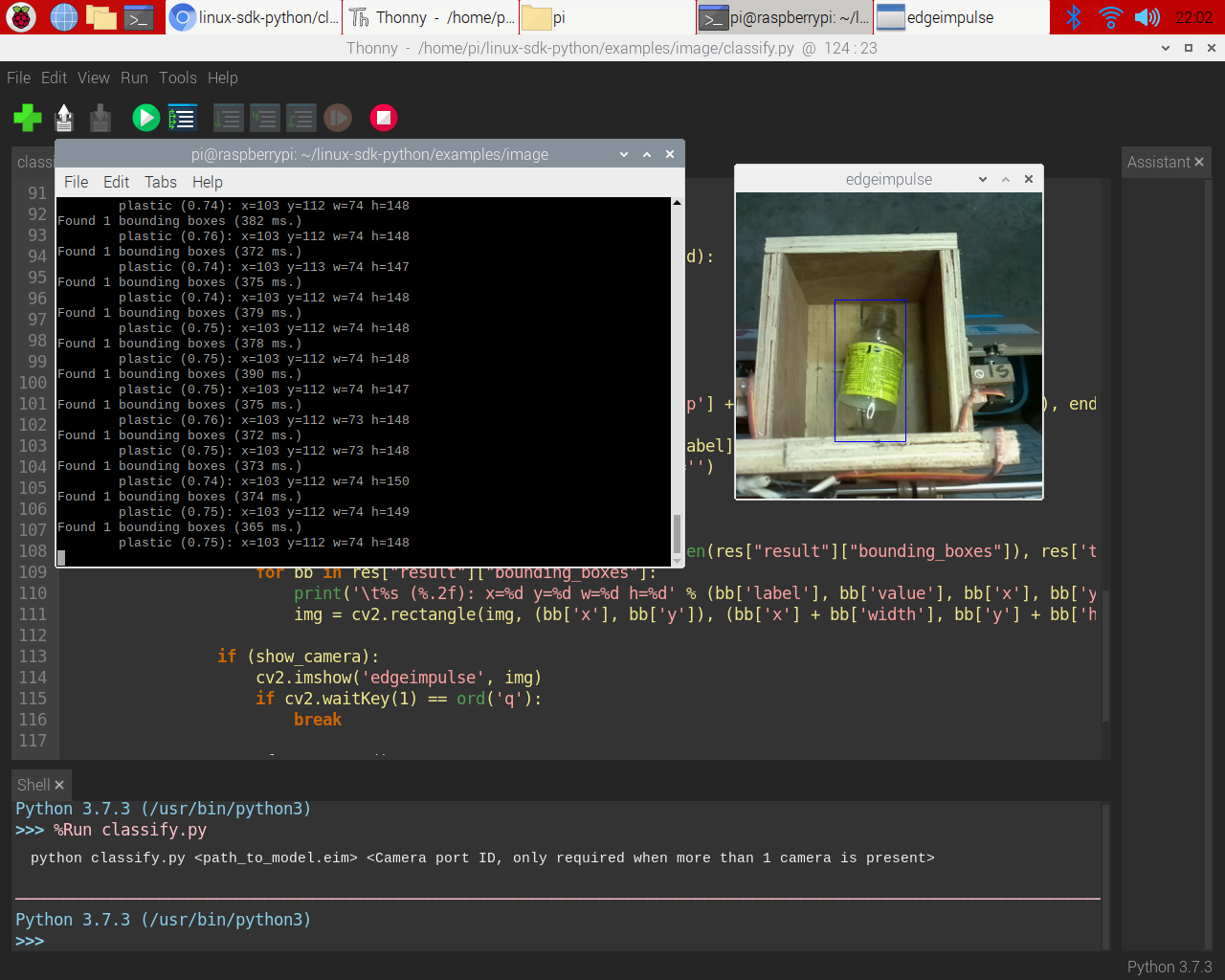
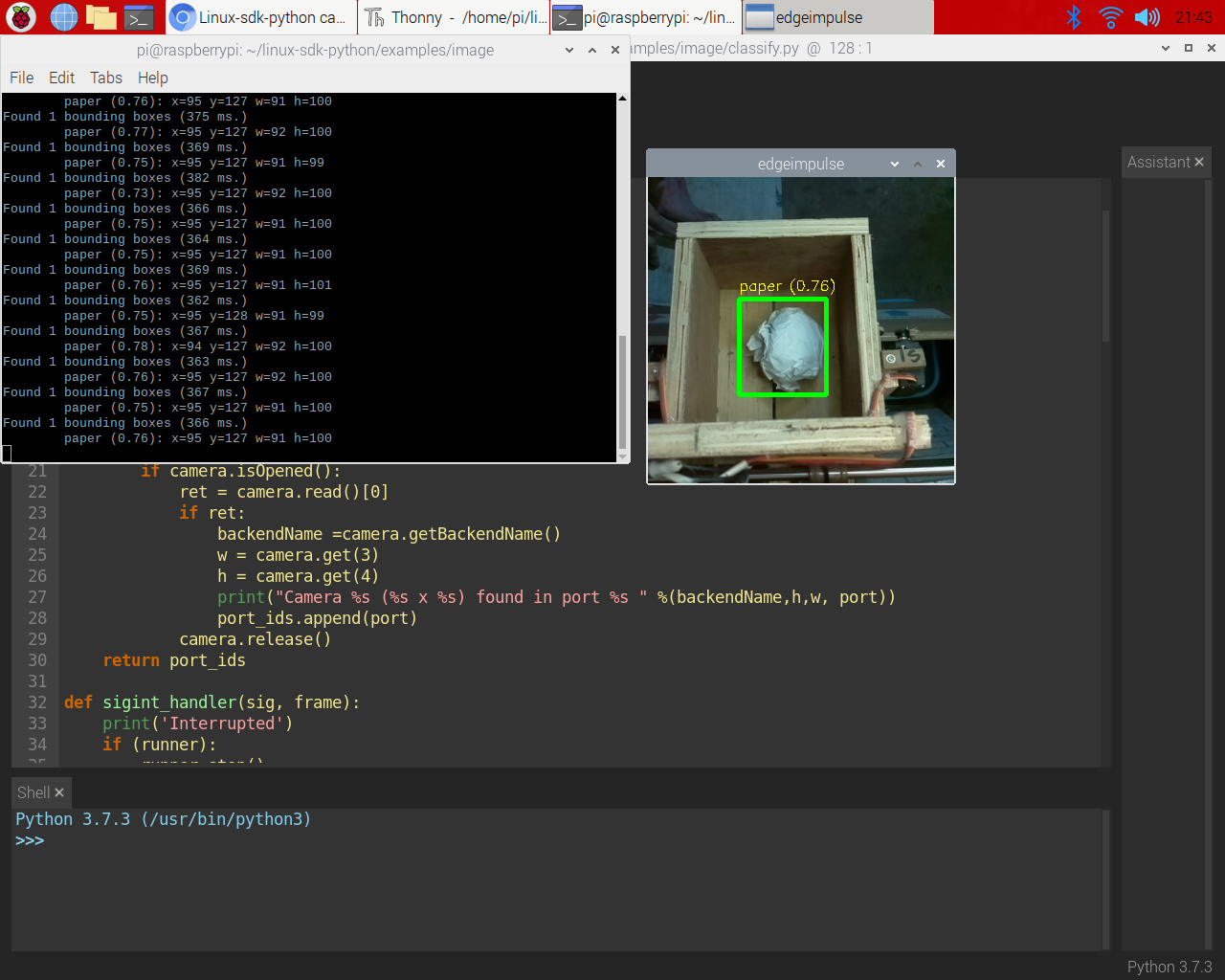
thank you @janjongboom, it work like charm, now i am trying to figure out how to add a label and the confidence score at the top of the bounding boxes, any suggestion?
i am planning to add some style to the text like adding a background color or maybe changing the stylefont, oh and by the way i am building a simple machine that can detect garbage and segregate them properly with the help og A.I and also your platform EGDE IMPULSE, my hardware is already set up including the prototype (raspberry pi4,stepper motor, servo motor, and some bunch of accesories connected to the Pi)and the only thing i am working on is this, the software side, currently it is trained to detect three garbagetype: obviously paper,plastic bottle,and a battery
in the future i will add more sample so that it can detect more types of garbage and hopefully i can deploy the machine to a small community near me and be able to raise awareness to them on how to properly segregate their own garbage