I got this error :
Traceback (most recent call last):
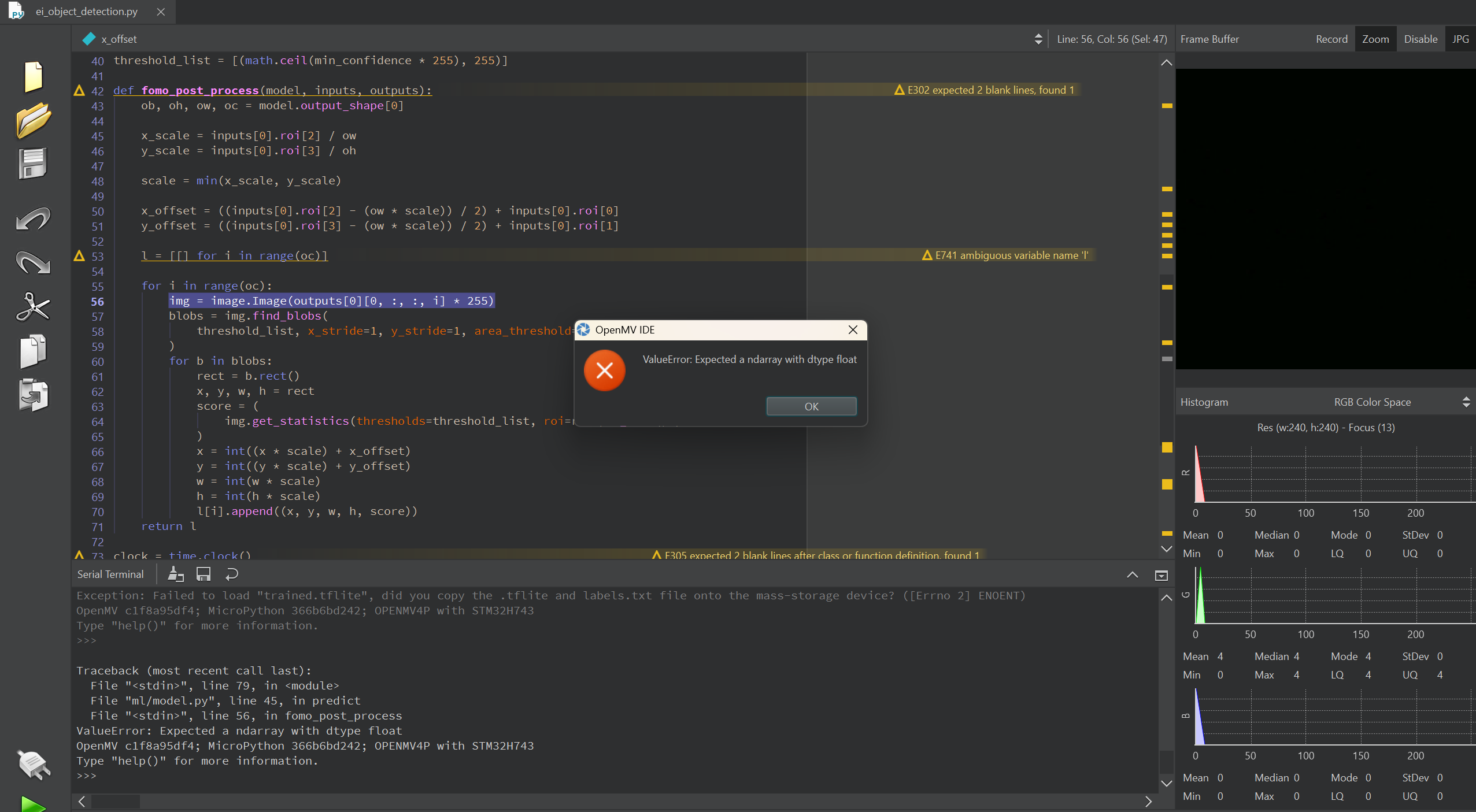
File “”, line 79, in
File “ml/model.py”, line 45, in predict
File “”, line 56, in fomo_post_process
ValueError: Expected a ndarray with dtype float
OpenMV v4.8.1; MicroPython v1.26.0-77; OPENMV4P with STM32H743
Type “help()” for more information.
How to fix it ?
# Edge Impulse - OpenMV FOMO Object Detection Example
#
# This work is licensed under the MIT license.
# Copyright (c) 2013-2024 OpenMV LLC. All rights reserved.
# https://github.com/openmv/openmv/blob/master/LICENSE
import sensor, image, time, ml, math, uos, gc
sensor.reset() # Reset and initialize the sensor.
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.set_windowing((240, 240)) # Set 240x240 window.
sensor.skip_frames(time=2000) # Let the camera adjust.
net = None
labels = None
min_confidence = 0.5
try:
# load the model, alloc the model file on the heap if we have at least 64K free after loading
net = ml.Model("trained.tflite", load_to_fb=uos.stat('trained.tflite')[6] > (gc.mem_free() - (64*1024)))
except Exception as e:
raise Exception('Failed to load "trained.tflite", did you copy the .tflite and labels.txt file onto the mass-storage device? (' + str(e) + ')')
try:
labels = [line.rstrip('\n') for line in open("labels.txt")]
except Exception as e:
raise Exception('Failed to load "labels.txt", did you copy the .tflite and labels.txt file onto the mass-storage device? (' + str(e) + ')')
colors = [ # Add more colors if you are detecting more than 7 types of classes at once.
(255, 0, 0),
( 0, 255, 0),
(255, 255, 0),
( 0, 0, 255),
(255, 0, 255),
( 0, 255, 255),
(255, 255, 255),
]
threshold_list = [(math.ceil(min_confidence * 255), 255)]
def fomo_post_process(model, inputs, outputs):
ob, oh, ow, oc = model.output_shape[0]
x_scale = inputs[0].roi[2] / ow
y_scale = inputs[0].roi[3] / oh
scale = min(x_scale, y_scale)
x_offset = ((inputs[0].roi[2] - (ow * scale)) / 2) + inputs[0].roi[0]
y_offset = ((inputs[0].roi[3] - (ow * scale)) / 2) + inputs[0].roi[1]
l = [[] for i in range(oc)]
for i in range(oc):
img = image.Image(outputs[0][0, :, :, i] * 255)
blobs = img.find_blobs(
threshold_list, x_stride=1, y_stride=1, area_threshold=1, pixels_threshold=1
)
for b in blobs:
rect = b.rect()
x, y, w, h = rect
score = (
img.get_statistics(thresholds=threshold_list, roi=rect).l_mean() / 255.0
)
x = int((x * scale) + x_offset)
y = int((y * scale) + y_offset)
w = int(w * scale)
h = int(h * scale)
l[i].append((x, y, w, h, score))
return l
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot()
for i, detection_list in enumerate(net.predict([img], callback=fomo_post_process)):
if i == 0: continue # background class
if len(detection_list) == 0: continue # no detections for this class?
print("********** %s **********" % labels[i])
for x, y, w, h, score in detection_list:
center_x = math.floor(x + (w / 2))
center_y = math.floor(y + (h / 2))
print(f"x {center_x}\ty {center_y}\tscore {score}")
img.draw_circle((center_x, center_y, 12), color=colors[i])
print(clock.fps(), "fps", end="\n\n")```