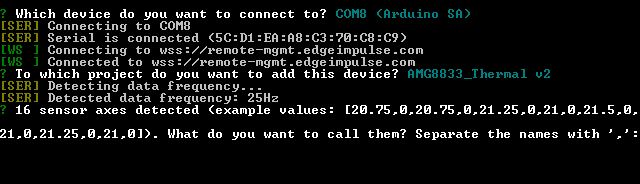
Hi , using the data forwarding I’ve collected data from an Arduino nano ble connected to an AG8833 ( 8x8 IR sensors matrix) and trained a model to detect simple gesture ( up, down , left , right , idle ).Everithing works perfectly. Now I’m looking to deploy on the Arduino so starting from the static_buffer example I’ve modified the sketch to include the sensor reading an test the model, but something is wrong and doesen’t work.In short in the same way I’ve uploaded the data with data forwarding I go to fill the feature vector and the pass the vector to the classifier, but also if the sensor reading works the classification don’t work at alland remain on the idle state ( nothing in fron to the sensor).
Where I’m wrong ?
Is it the right way to proceed ?
/* Includes ---------------------------------------------------------------- */
#include <amg8833_thermal_inference.h>
#include <Wire.h>
#include <Adafruit_AMG88xx.h>
#define FREQUENCY_HZ 28
#define INTERVAL_MS (1000 / (FREQUENCY_HZ + 1))
Adafruit_AMG88xx amg;
float pixels[AMG88xx_PIXEL_ARRAY_SIZE];
static float features[896] = {0}; // the 896 was suggested by the static buffer sketch.
static unsigned long last_interval_ms = 0;
/**
* @brief Copy raw feature data in out_ptr
* Function called by inference library
*
* @param[in] offset The offset
* @param[in] length The length
* @param out_ptr The out pointer
*
* @return 0
*/
int raw_feature_get_data(size_t offset, size_t length, float *out_ptr) {
memcpy(out_ptr, features + offset, length * sizeof(float));
return 0;
}
/**
* @brief Arduino setup function
*/
void setup() {
Serial.begin(115200);
Serial.println(F("AMG88xx pixels"));
Serial.println("Edge Impulse Inferencing Demo");
bool status;
// default settings
status = amg.begin();
if (!status) {
Serial.println("Could not find a valid AMG88xx sensor, check wiring!");
while (1);
}
}
/**
* @brief Arduino main function
*/
void loop()
{
//static float features[];
if (millis() > last_interval_ms + INTERVAL_MS) {
last_interval_ms = millis();
//read all the pixels
amg.readPixels(pixels);
Serial.print("Sensor reading....");
// fill features vector with sensor reading
for(int i=1; i<=AMG88xx_PIXEL_ARRAY_SIZE; i++){
features[i] = pixels[i-1];
Serial.print(features[i]);
Serial.print(",");
if( i%8 == 0 ) Serial.println();
}
ei_printf("Edge Impulse standalone inferencing (Arduino)\n");
if (sizeof(features) / sizeof(float) != EI_CLASSIFIER_DSP_INPUT_FRAME_SIZE) {
ei_printf("The size of your 'features' array is not correct. Expected %lu items, but had %lu\n",
EI_CLASSIFIER_DSP_INPUT_FRAME_SIZE, sizeof(features) / sizeof(float));
delay(1000);
return;
}
ei_impulse_result_t result = { 0 };
// the features are stored into flash, and we don't want to load everything into RAM
signal_t features_signal;
features_signal.total_length = sizeof(features) / sizeof(features[0]);
features_signal.get_data = &raw_feature_get_data;
// invoke the impulse
EI_IMPULSE_ERROR res = run_classifier(&features_signal, &result, false /* debug */);
ei_printf("run_classifier returned: %d\n", res);
if (res != 0) return;
// print the predictions
ei_printf("Predictions ");
ei_printf("(DSP: %d ms., Classification: %d ms., Anomaly: %d ms.)",
result.timing.dsp, result.timing.classification, result.timing.anomaly);
ei_printf(": \n");
ei_printf("[");
for (size_t ix = 0; ix < EI_CLASSIFIER_LABEL_COUNT; ix++) {
ei_printf("%.5f", result.classification[ix].value);
#if EI_CLASSIFIER_HAS_ANOMALY == 1
ei_printf(", ");
#else
if (ix != EI_CLASSIFIER_LABEL_COUNT - 1) {
ei_printf(", ");
}
#endif
}
#if EI_CLASSIFIER_HAS_ANOMALY == 1
ei_printf("%.3f", result.anomaly);
#endif
ei_printf("]\n");
// human-readable predictions
for (size_t ix = 0; ix < EI_CLASSIFIER_LABEL_COUNT; ix++) {
ei_printf(" %s: %.5f\n", result.classification[ix].label, result.classification[ix].value);
}
#if EI_CLASSIFIER_HAS_ANOMALY == 1
ei_printf(" anomaly score: %.3f\n", result.anomaly);
#endif
delay(1000);
}
}
/**
* @brief Printf function uses vsnprintf and output using Arduino Serial
*
* @param[in] format Variable argument list
*/
void ei_printf(const char *format, ...) {
static char print_buf[1024] = { 0 };
va_list args;
va_start(args, format);
int r = vsnprintf(print_buf, sizeof(print_buf), format, args);
va_end(args);
if (r > 0) {
Serial.write(print_buf);
}
}
 and here the serial data on com8:
and here the serial data on com8: