Hello @muhit313
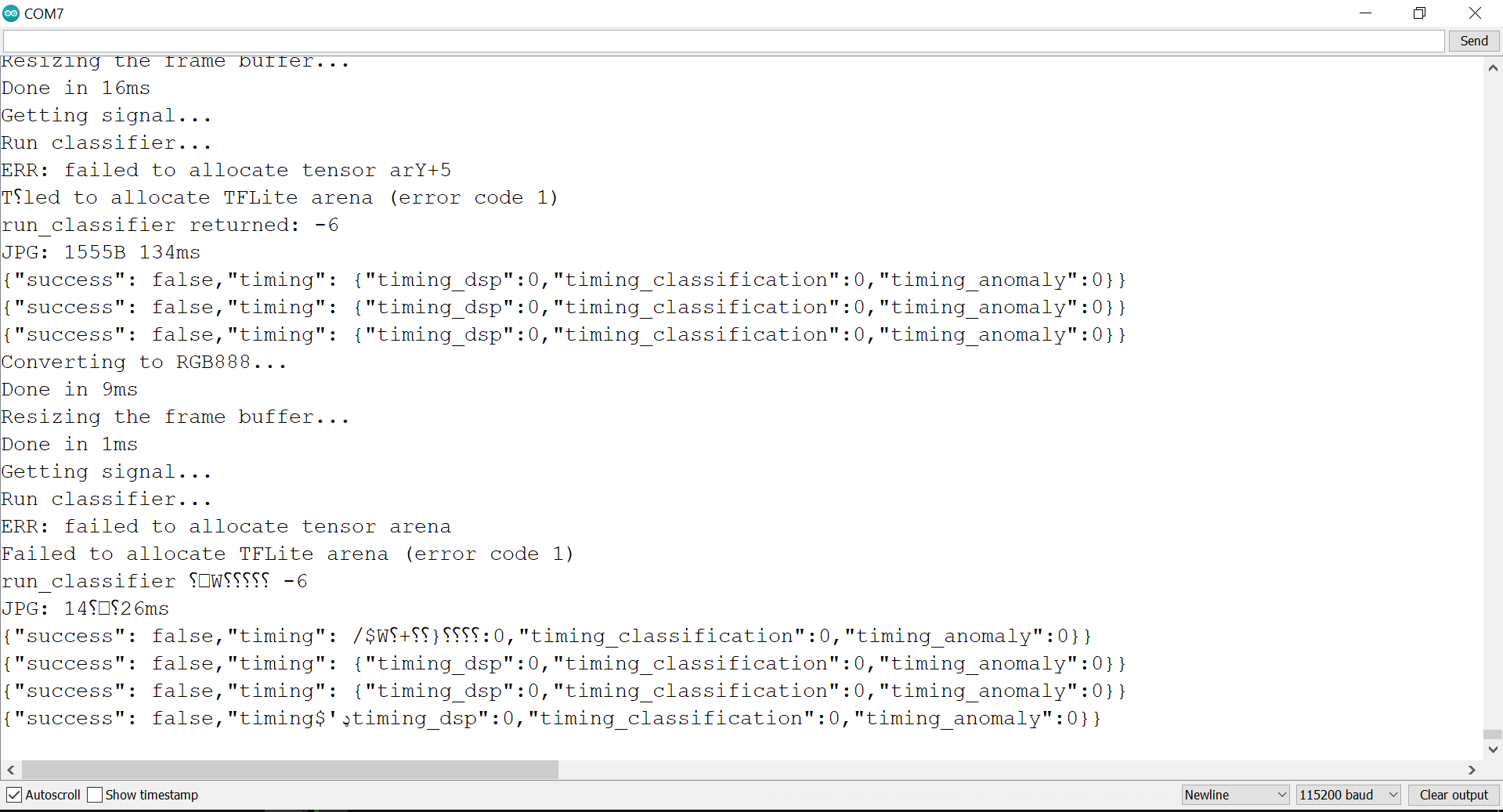
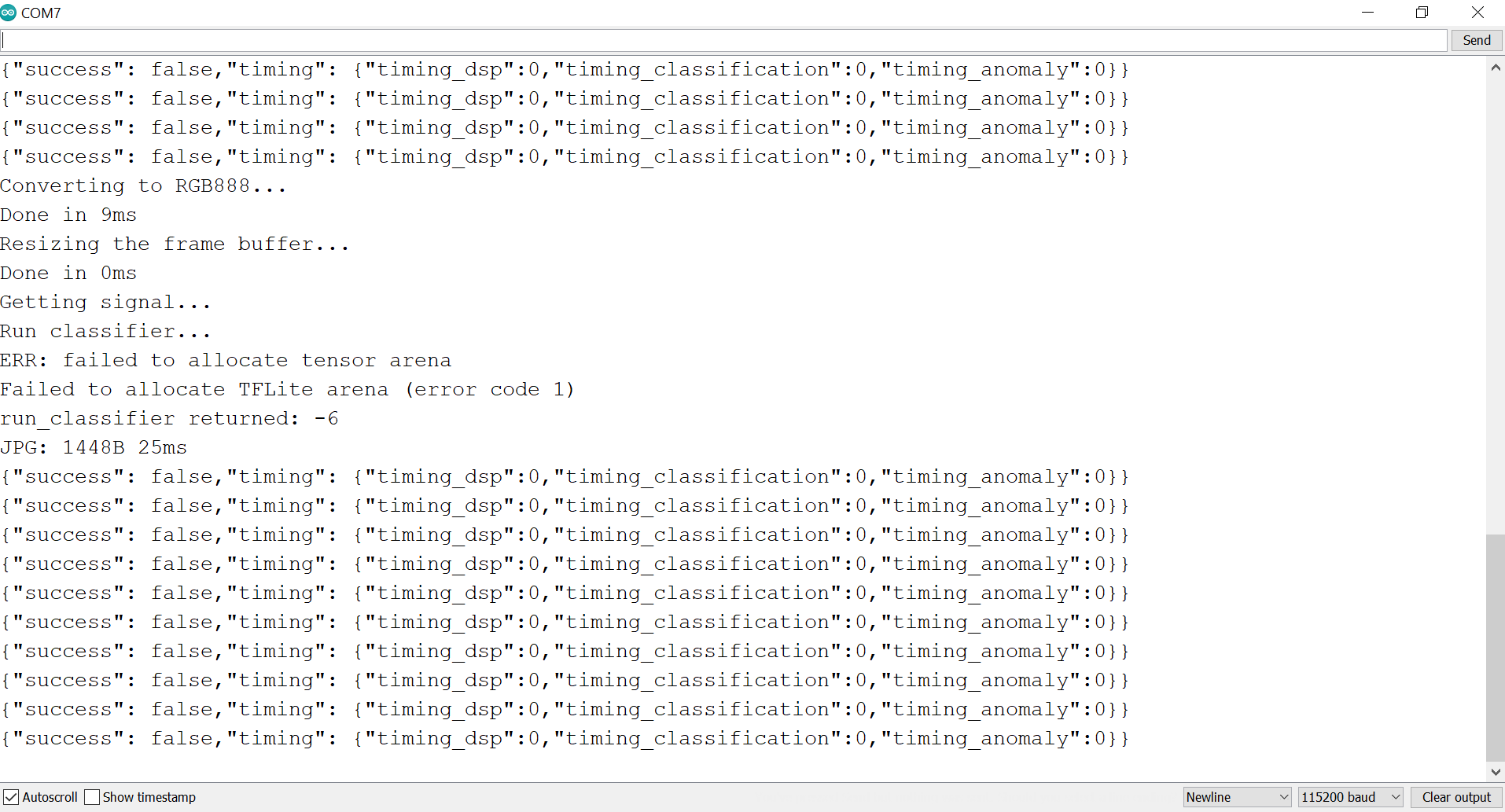
So I took some time today to have a deeper look at the ESP recurring issues.
I adapted one arduino sketch from this link to include Edge Impulse inference: https://randomnerdtutorials.com/esp32-cam-take-photo-save-microsd-card/
Note that you can view the orginal file if you insert a fat32 formated SD Card in the ESP32 Cam.
Here is the code (I tried with your project model to make sure it worked):
You’ll need to modify the PIN definition for your esp camera model but I’m sure you’ll be able to find out 
#include "esp_camera.h"
#include "esp_timer.h"
#include "Arduino.h"
#include "img_converters.h"
#include "image_util.h"
#include "FS.h" // SD Card ESP32
#include "SD_MMC.h" // SD Card ESP32
#include "soc/soc.h" // Disable brownour problems
#include "soc/rtc_cntl_reg.h" // Disable brownour problems
#include "driver/rtc_io.h"
#include <EEPROM.h> // read and write from flash memory
// Modify the following line according to your project name
// Do not forget to import the library using "Sketch">"Include Library">"Add .ZIP Library..."
#include <esp32Cam10taaka_inferencing.h>
// define the number of bytes you want to access
#define EEPROM_SIZE 1
// Pin definition for CAMERA_MODEL_AI_THINKER
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
int pictureNumber = 0;
uint8_t *ei_buf;
ei_impulse_result_t result = {0};
bool sd_card = true;
void setup() {
WRITE_PERI_REG(RTC_CNTL_BROWN_OUT_REG, 0); //disable brownout detector
Serial.begin(115200);
//Serial.setDebugOutput(true);
//Serial.println();
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
if (psramFound()) {
config.frame_size = FRAMESIZE_QVGA; // FRAMESIZE_ + QVGA|CIF|VGA|SVGA|XGA|SXGA|UXGA
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_QVGA;
config.jpeg_quality = 12;
config.fb_count = 1;
}
// Init Camera
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
//Serial.println("Starting SD Card");
if (!SD_MMC.begin()) {
Serial.println("SD Card Mount Failed");
sd_card = false;
}
uint8_t cardType = SD_MMC.cardType();
if (cardType == CARD_NONE) {
Serial.println("No SD Card attached");
sd_card = false;
}
}
void take_picture()
{
camera_fb_t * fb = NULL;
uint8_t *rgb888_buf = NULL;
size_t out_len;
bool s;
// Take Picture ----------------------------------
int64_t time_start = esp_timer_get_time();
fb = esp_camera_fb_get();
if (!fb) {
Serial.println("Camera capture failed");
return;
}
int64_t time_end = esp_timer_get_time();
Serial.printf("JPG: %uB %ums\n", (uint32_t)(fb->len), (uint32_t)((time_end - time_start) / 1000));
//Save Orginal Picture ------------------
if (sd_card) {
// initialize EEPROM with predefined size
EEPROM.begin(EEPROM_SIZE);
pictureNumber = EEPROM.read(0) + 1;
// Path where new picture will be saved in SD Card
String path = "/original" + String(pictureNumber) + ".jpg";
fs::FS &fs = SD_MMC;
Serial.printf("Picture file name: %s\n", path.c_str());
File file = fs.open(path.c_str(), FILE_WRITE);
if (!file) {
Serial.println("Failed to open file in writing mode");
}
else {
file.write(fb->buf, fb->len); // payload (image), payload length
Serial.printf("Saved file to path: %s\n", path.c_str());
EEPROM.write(0, pictureNumber);
EEPROM.commit();
}
file.close();
}
// Process the image before inferencing --------------------
// Allocate ei_matrix buffer
dl_matrix3du_t *rgb888_matrix = dl_matrix3du_alloc(1, fb->width, fb->height, 3);
//Resize Image
rgb888_buf = rgb888_matrix->item;
out_len = EI_CLASSIFIER_INPUT_WIDTH * EI_CLASSIFIER_INPUT_HEIGHT * 3;
// Convert frame to RGB888
Serial.println("Converting to RGB888...");
time_start = esp_timer_get_time();
s = fmt2rgb888(fb->buf, fb->len, fb->format, rgb888_buf);
if (!s)
{
dl_matrix3du_free(rgb888_matrix);
Serial.println("to rgb888 failed");
return;
}
time_end = esp_timer_get_time();
Serial.printf("Done in %ums\n", (uint32_t)((time_end - time_start) / 1000));
Serial.println("Resizing the frame buffer...");
dl_matrix3du_t *resized_matrix = dl_matrix3du_alloc(1, EI_CLASSIFIER_INPUT_WIDTH, EI_CLASSIFIER_INPUT_HEIGHT, 3);
ei_buf = resized_matrix->item;
time_start = esp_timer_get_time();
image_resize_linear(ei_buf, rgb888_buf, EI_CLASSIFIER_INPUT_WIDTH, EI_CLASSIFIER_INPUT_HEIGHT, 3, fb->width, fb->height);
time_end = esp_timer_get_time();
Serial.printf("Done in %ums\n", (uint32_t)((time_end - time_start) / 1000));
dl_matrix3du_free(rgb888_matrix);
dl_matrix3du_free(resized_matrix);
esp_camera_fb_return(fb);
// Run inference ---------------------
classify();
// Turns off the ESP32-CAM white on-board LED (flash) connected to GPIO 4
pinMode(4, OUTPUT);
digitalWrite(4, LOW);
rtc_gpio_hold_en(GPIO_NUM_4);
delay(2000);
Serial.println("Going to sleep now");
delay(2000);
esp_deep_sleep_start();
Serial.println("This will never be printed");
}
int raw_feature_get_data(size_t offset, size_t length, float *signal_ptr)
{
memcpy(signal_ptr, ei_buf + offset, length * sizeof(float));
return 0;
}
void classify()
{
Serial.println("Getting signal...");
// Set up pointer to look after data, crop it and convert it to RGB888
signal_t signal;
signal.total_length = EI_CLASSIFIER_INPUT_WIDTH * EI_CLASSIFIER_INPUT_WIDTH;
signal.get_data = &raw_feature_get_data;
Serial.println("Run classifier...");
// Feed signal to the classifier
EI_IMPULSE_ERROR res = run_classifier(&signal, &result, false /* debug */);
// Returned error variable "res" while data object.array in "result"
ei_printf("run_classifier returned: %d\n", res);
if (res != 0)
return;
// print the predictions
ei_printf("Predictions (DSP: %d ms., Classification: %d ms., Anomaly: %d ms.): \n",
result.timing.dsp, result.timing.classification, result.timing.anomaly);
for (size_t ix = 0; ix < EI_CLASSIFIER_LABEL_COUNT; ix++) {
ei_printf(" %s: \t%f\r\n", result.classification[ix].label, result.classification[ix].value);
}
#if EI_CLASSIFIER_HAS_ANOMALY == 1
ei_printf(" anomaly score: %f\r\n", result.anomaly);
#endif
}
void loop() {
take_picture();
}
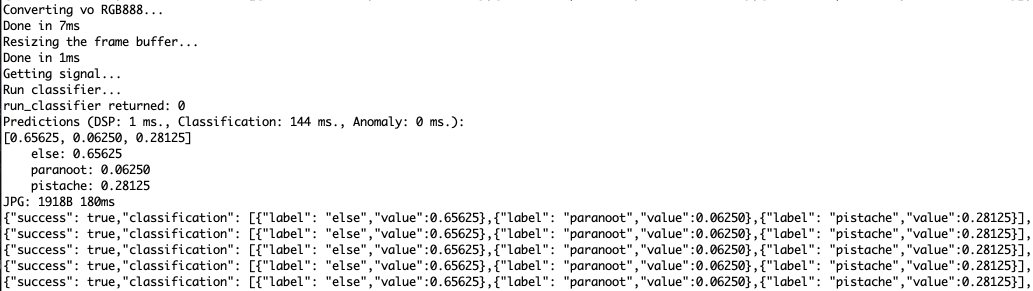
And as a return in the serial console you should see something like this:
Picture file name: /original1.jpg
Saved file to path: /original1.jpg
Converting to RGB888...
Done in 100ms
Resizing the frame buffer...
Done in 55ms
Getting signal...
Run classifier...
run_classifier returned: 0
Predictions (DSP: 4 ms., Classification: 583 ms., Anomaly: 0 ms.):
10taka: 0.367188
unknown: 0.632812
Going to sleep now
If this works for you I’ll update the Github repository to replace the basic example with this one.
Loading a web interface over wifi might be too greedy on ressources for some use cases.
Regards,
Louis