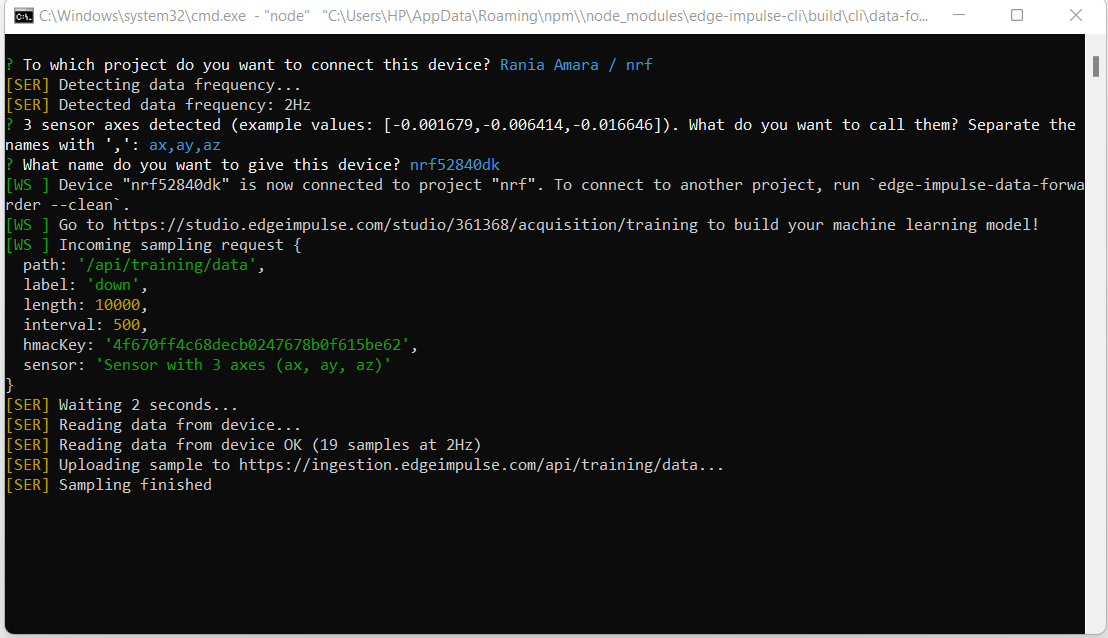
hi ,i’m trying to connect lsm6dso with nrf52840dk to edge impulse via edge-impulse-data-forwarder and lsm6dso is a 6 axes sensor ,however when i use edge-impulse-data-forwarder it collects only the data of 3axes of the gyroscope .so is there a way to collect the data of 6 axes .
Hi @rania23
Yes you can simply add more to our public firmware repo and rebuild, or forward from any device that can output to the same protocol:
Best
Eoin
hi ,i’m using the code in lsm6dso sample in zephyr ncs ,it’s like when i print the 6 axes values i got this :
I dont know that example @rania23 but you will need to add another array for the gyro something like:
struct sensor_value accel[3];
struct sensor_value gyro[3];
Then print out the values to serial:
printf("AX: %f AY: %f AZ: %f GX: %f GY: %f GZ: %f\n",
sensor_value_to_double(&accel[0]),
sensor_value_to_double(&accel[1]),
sensor_value_to_double(&accel[2]),
sensor_value_to_double(&gyro[0]),
sensor_value_to_double(&gyro[1]),
sensor_value_to_double(&gyro[2]));
k_sleep(K_MSEC(100));
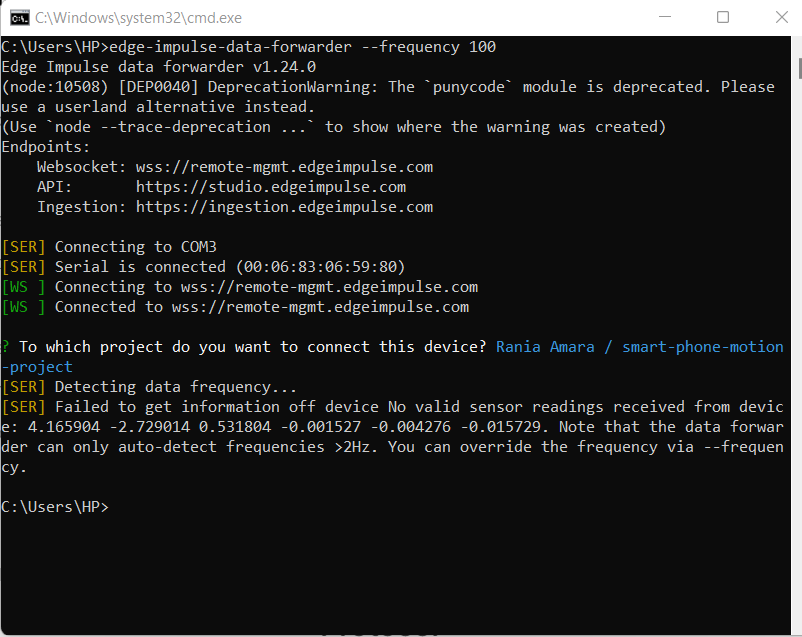
Make sure you then set the frequency to whatever the rate of capture is e.g:
edge-impulse-data-forwarder --frequency 100
Hope this helps you get started
Best
Eoin