Question/Issue:
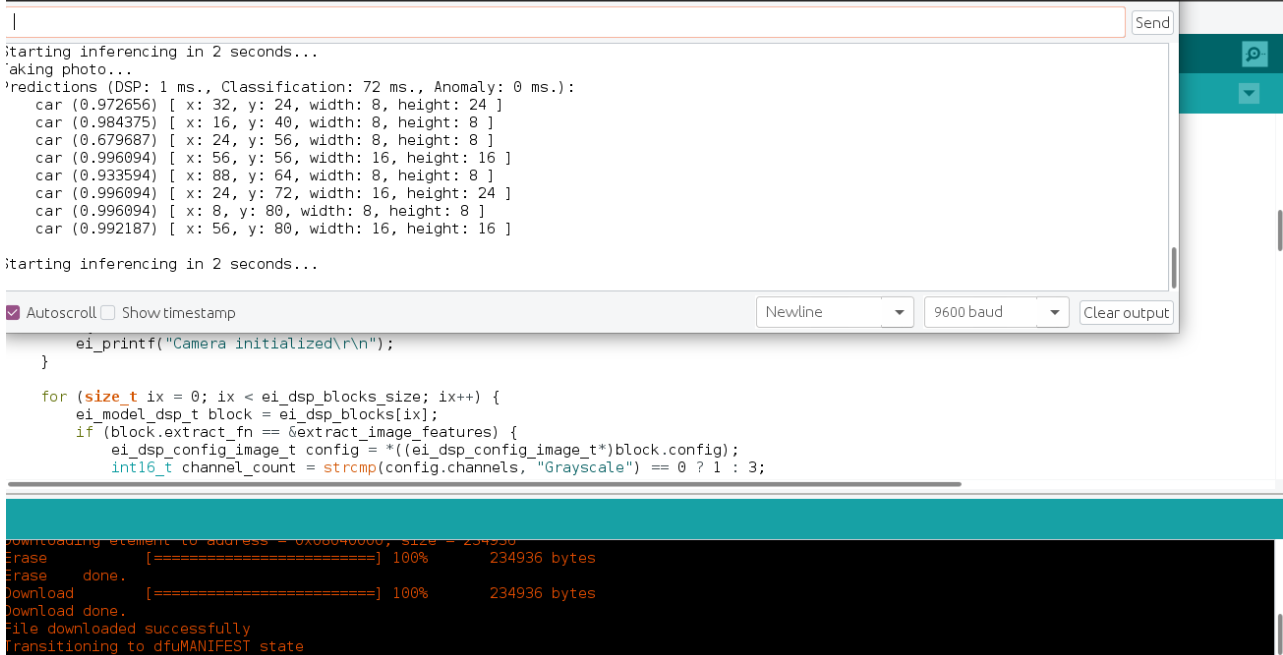
I deploy FOMO to Nicla Vision by following the tutorial. This project can successfully detect the object and its location now. I wonder whether I can analyse the motion of the object from camera or not from edge impulse? By the way, what does the x, y, w, h in the serial port stand for (as shown in the picture.
By default, FOMO only gives you the location (x, y) of the bounding box (see this talk to learn more about FOMO: tinyML Talks: Constrained Object Detection on Microcontrollers with FOMO - YouTube). I’m not sure where width and height are coming from–I’ll look into that. However, these bounding boxes are for static images only. You might be able to do some math to track an object and calculate its motion, but that’s not something Edge Impulse does out of the box.
Thanks for replying. I want to use the location to calculate the speed of an object. What is the unit of x and y and what do they stand for ? I am a bit confused right now
x and y are the top-left coordinates of the bounding box, given in pixels. Here’s a reference showing the output struct of object detection: ei_impulse_result_bounding_box_t - Edge Impulse API. Hope that helps!