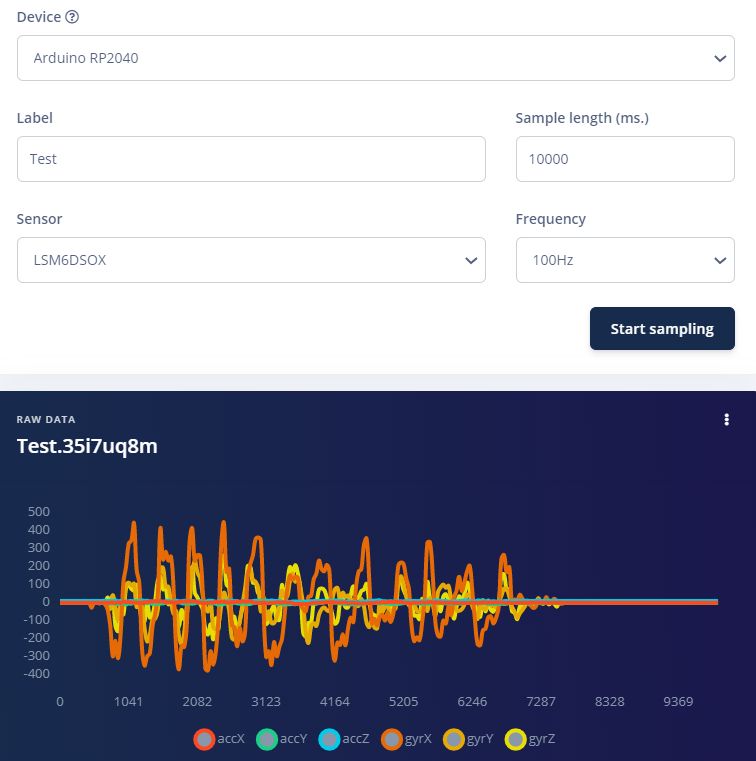
How do I get the Edge Impulse to see the built in sensors (microphone/accelerometer/gyro) on the Arduino Nano RP2040? I have added the Arduino to devices using the Raspberry Pi RP2040 firmware, but the Arduino sensors do not show up for the device in the Data Acquisition page. I only see ADC and Sonic Ranging sensors.
Is the only option with this board to use the Data Forwarder?
The Arduino Nano RP2040 Connect is not an officially supported board. I’m guessing you loaded on the firmware for the Raspberry Pi Pico (https://docs.edgeimpulse.com/docs/development-platforms/officially-supported-mcu-targets/raspberry-pi-rp2040). If so, that firmware does not contain code for controlling sensors on the Arduino Nano RP2040. For now, I believe that the only option is to use the Data Forwarder or to collect your own samples (e.g. in CSV format).
I will ask our dev team to see if there are plans to support other sensors.
We’re actually working on RP2040 firmware upgrade and it is coming soon. I’m testing it right now, but it should be possible to use IMU and microphone on Arduino RP2040 Connect after the upgrade. I’ll notify you when it is out.
I am currently trying to integrate the Arduino PDM into the project. There are already microphone examples for the original RP2040 but I can’t really get any further at the moment. I’ll go back to the community for support.
Can anyone give any points on what you needed modify the Raspberry Pi Firmware (assuming you both modified the Rpi firmware form Edge Impulse) to make this work? How do you compile the source code to uf2? Thanks gents
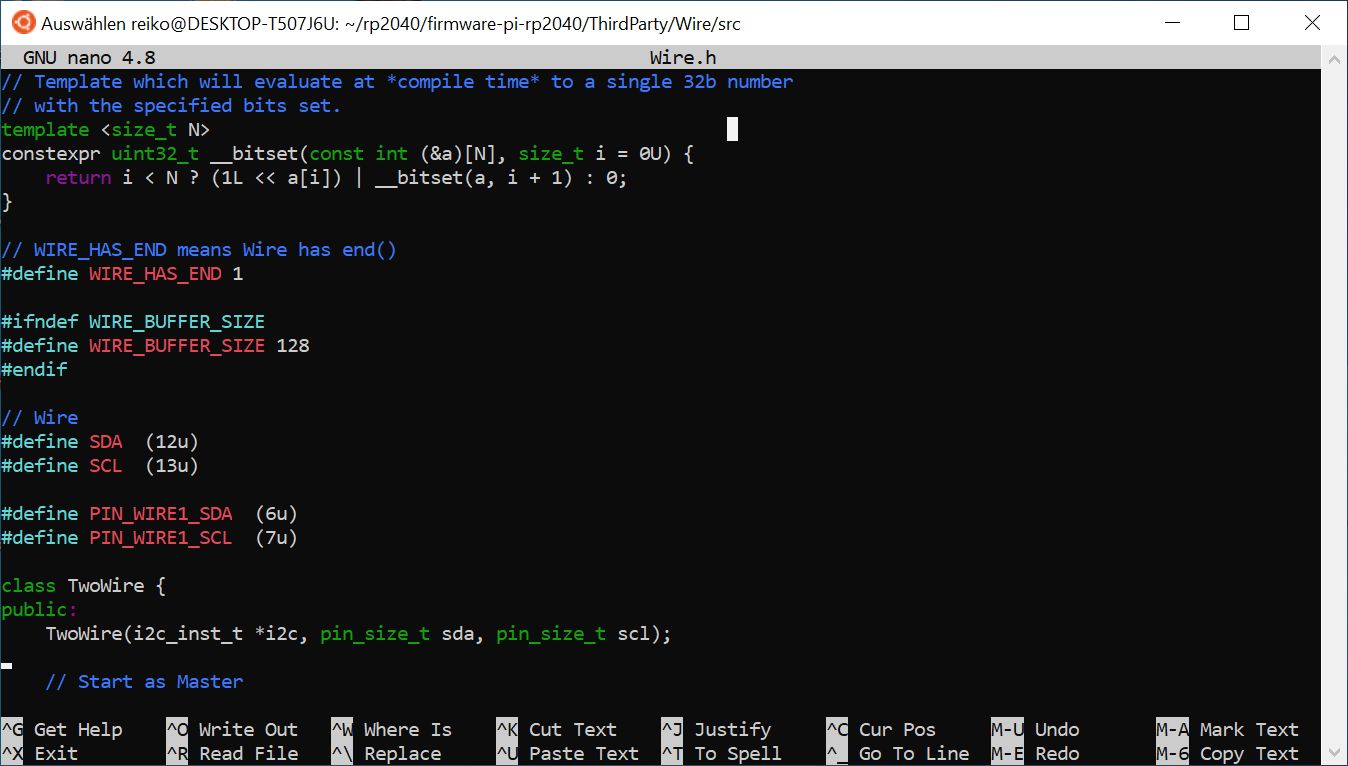
Go to firmware-pi-rp2040/ThirdParty/Wire/src/Wire.h and change the SDA & SCL pin, as remark by RickorDD above.
If you read the readme in the firmware repo, it says you need to install the PICO_SDK in your machine, so git clone that repo in your machine, GitHub - raspberrypi/pico-sdk & set the path variable as where you put this pico sdk folder.
Back to your firmware folder, run the lines as in the readme. The output uf2 file will be located in the firmware-pi-rp2040/build folder.
FYI, my machine is windows10, and i ran the above in WSL Ubuntu 18.04.
After done the dataset collection, training, validation & compiling the arduino library in edge impulse studio, i was trying to run the inference example with my nano rp2040, the static buffer example sketch works well, serial report the classifier correctly. The problem i face now is, i can’t get any respond in serial when i run the ‘nano_ble33_sense_accelerometer_continuous’ sketch, which i’d modified
line#25, replace
& line#191, EI_CLASSIFIER_SENSOR_ACCELEROMETER to EL_CLASSIFIER_SENSOR_FUSION.
#if !defined(EI_CLASSIFIER_SENSOR) || EI_CLASSIFIER_SENSOR != EI_CLASSIFIER_SENSOR_FUSION // EI_CLASSIFIER_SENSOR_ACCELEROMETER
#error "Invalid model for current sensor"
#endif
Any advice from anyone how to run inference with nano rp2040?
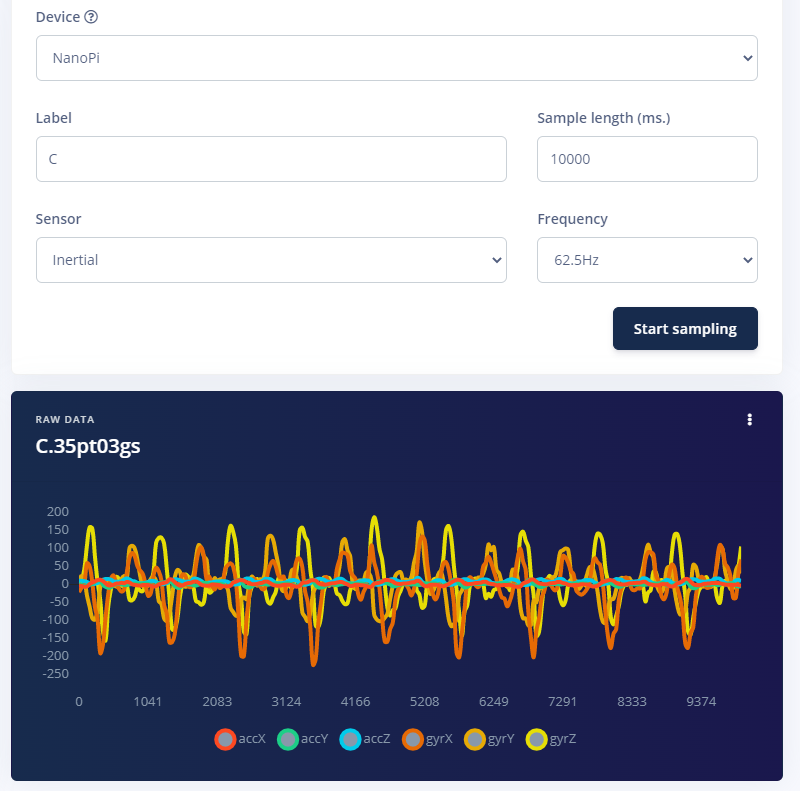
I am working with a Custom RP2040 board and I adapted the new firmware to make it work, also I changed the Inertial sensor code to support mine a (3-axis LIS3DH) and a PDM mic.
what is the right setting for PDM and Microphone Arduino Connect RP2040?
My mic on board running with 20000 Sampling Frequency and 512 SampleBuffer at a Sketch Example.